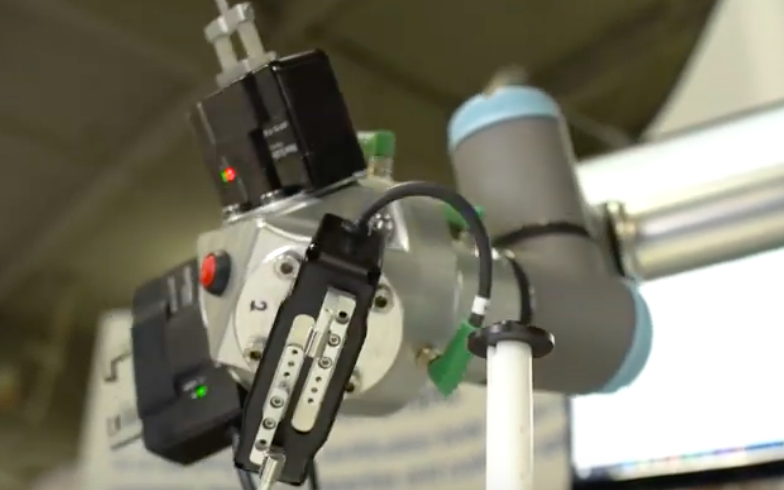
PneuConnect with GRT gripper on a UR cobot. Source: PHD
PHD Inc. this month added three products to its line of grippers and accessories for industrial automation. They are intended to help robots grip large objects, make positioning and programming easy for maximum efficiency, and facilitate machine tending. PHD’s products are designed to work with collaborative robot arms, or cobots, from Universal Robots A/S.
Fort Wayne, In.-based PHD said it sells grippers, linear slides, and the widest range of long-life, robust actuators in the industry. It also offers engineering software and Internet-based tools to save design time, support from factory-trained application and industry specialists, and rapid product delivery.
PHD adds jaw-travel option to GRR line
The company has added a 300mm (11.81 in.) jaw-travel model of its Series GRR high-capacity pneumatic grippers. These parallel grippers are designed to provide high grip force, five long-jaw travels, and high loads.
Because the Guardian grippers can withstand high impact and shock loads, they are suitable for applications such as small engine block manufacturing, automotive wheel-rim manufacturing, and foundry applications, said PHD.
Also available is the Series EGRR high-capacity electric parallel grippers, which offer many of the same benefits as the pneumatic design.
Pneu-Connect X2 with dual grippers available
PHD also announced the release of Pneu-Connext X2 kits with dual grippers. They can be mounted to UR cobots for maximum efficiency in automation performance.
The Pneu-Connect X2 includes PHD’s Freedrive feature, which interfaces with UR cobots for easy positioning and programming. The kits come in the following standard combinations:
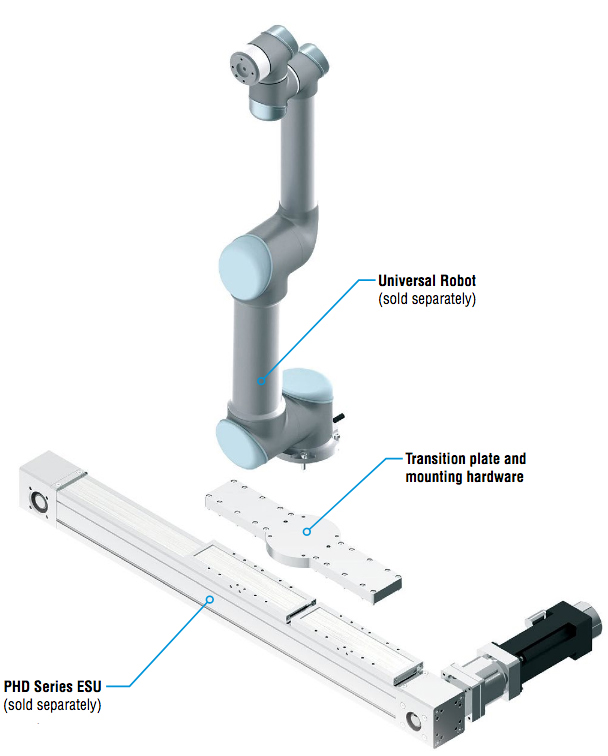
Transition plates connect UR directly to linear actuator
PHD’s transition plate allows a Universal Robot arm to be directly attached to the new PHD Series ESU electric belt-driven linear actuator. The company said it offers a transition plate for each size of UR arm, “taking machine tending to a whole new level.”
This transition plate provides a seventh axis for UR arms with the ESU linear actuator. Source: PHD
With a cataloged stroke of up to 5500mm (216.53 in.), users can increase the working area of a UR10 arm by 10 times.
Acutronic Robotics today announced on its blog that it is shutting down on July 31. The company, which has offices in Switzerland and Spain, offered communication tools based on the Robot Operating System for modular robot design.
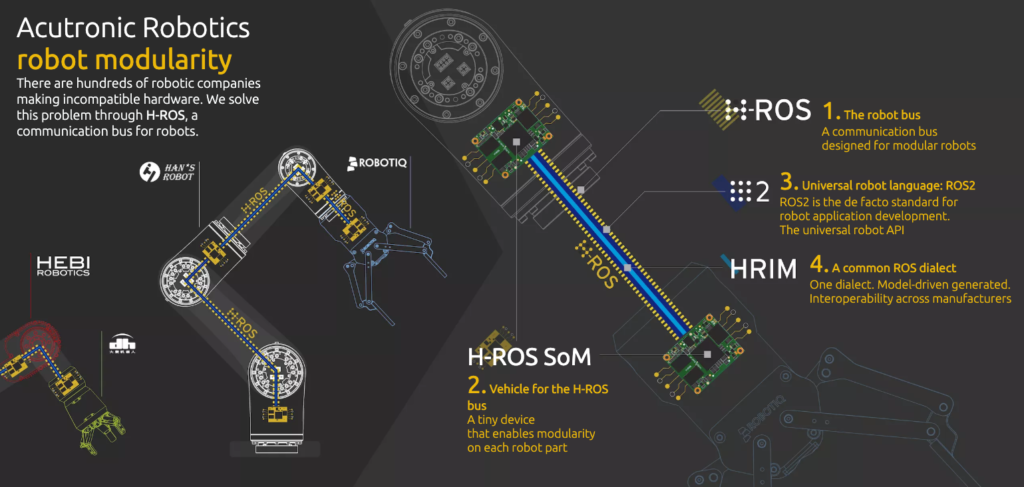
The company, which was founded in 2016 after Acutronic Link Robotics AG’s acquisition of Erle Robotics, said it had been waiting on financing. Acutronic Robotics was developing the Hardware Robot Operating System or H-ROS, a communication bus to enable robot hardware to interoperate smoothly, securely, and safely.
Components of Acutronic’s technology included the H-ROS System on Module (SoM) device for the bus, ROS2 as the “universal robot language” and application programming interface, and the Hardware Robot Information Model (HRIM) as a common ROS dialect.
Acutronic was involved in the development of the open-source ROS2 and was recently named a “Top 10 ROS-based robotics company” for 2019. The company built MARA, the first robot natively running on ROS2.
In January, Acutronic Robotics said that it had made grippers from Robotiq “seamlessly interoperable with all other ROS2-speaking robotic components, regardless of their original manufacturer.”
H-ROS was intended to make robot hardware work together more easily. Source: Acutronic Robotics
Funding challenges
HRIM was funded through the EU’s ROS-Industrial (ROSIN) project, and the U.S. Defense Advanced Projects Research Agency (DARPA) had invested in H-ROS.
In September 2017, Acutronic raised an unspecified amount of Series A funding led by the Sony Innovation Fund. More recently, however, the company had difficulty finding venture capital.
“We continue to believe that our robot modularity technology and vision are relevant strategically speaking, both product and positioning wise,” stated Victor Mayoral, CEO of Acutronic Robotics. however we probably hit the market too early and fell short of resources.”
According to Acutronic’s blog post, the company received acquisition proposals but was unable to agree to any of them.
The global robot operating system market will experience a compound annual growth rate of 8.8% between 2018 and 2026, predicts Transparency Market Research. However, that forecast includes proprietary industrial software and customized robots.
Mayoral didn’t specify what would happen to Acutronic Robotics’ approximately 30 staffers or its intellectual property, but he tried to end on an optimistic note.
“We are absolutely convinced that ROS is a key blueprint for the future of robotics,” Mayoral said. “The ROS robotics community has been a constant inspiration for all of us over these past years, and I’m sure that with the new ROS 2, many more companies will be inspired in the same way. Our team members are excited about their next professional steps, and I’m sure many of us will stay very close to the ROS community.”
Among the challenges for developers of mobile manipulation and humanoid robots is the need for an affordable and flexible research platform. PAL Robotics last month announced its TIAGo++, a robot that includes two arms with seven degrees of freedom each.
As with PAL Robotics‘ one-armed TIAGo, the new model is based on the Robot Operating System (ROS) and can be expanded with additional sensors and end effectors. TIAGo++ is intended to enable engineers to create applications that include a touchscreen interface for human-robot interaction (HRI) and require simultaneous perception, bilateral manipulation, mobility, and artificial intelligence.
Jordi Pagès, product manager of the TIAGo robot at PAL Robotics responded to the following questions about TIAGo++ from The Robot Report:
For the development of TIAGo++, how did you collect feedback from the robotics community?
Pagès: PAL Robotics has a long history in research and development. We have been creating service robotics platforms since 2004. When we started thinking about the TIAGo robot development, we asked researchers from academia and industry which features would they expect or value in a platform for research.
Our goal with TIAGo has always been the same: to deliver a robust platform for research that easily adapts to diverse robotics projects and use cases. That’s why it was key to be in touch with the robotics and AI developers from start.
After delivering the robots, we usually ask for feedback and stay in touch with the research centers to learn about their activities and experiences, and the possible improvements or suggestions they would have. We do the same with the teams that use TIAGo for competitions like RoboCup or the European Robotics League [ERL].
At the same time, TIAGo is used in diverse European-funded projects where end users from different sectors, from healthcare to industry, are involved. This allows us to also learn from their feedback and keep finding new ways in which the platform could be of help in a user-centered way. That’s how we knew that adding a second arm into the TIAGo portfolio of its modular possibilities could be of help to the robotics community.
How long did it take PAL Robotics to develop the two-armed TIAGo++ in comparison with the original model?
Pagès: Our TIAGo platform is very modular and robust, so it took us just few months from taking the decision to having a working TIAGo++ ready to go. The modularity of all our robots and our wide experience developing humanoids usually helps us a lot in reducing the redesign and production time.
The software is also very modular, with extensive use of ROS, the de facto standard robotics middleware. Our customers are able to upgrade, modify, and substitute ROS packages. That way, they can focus their attention on their real research on perception, navigation, manipulation, HRI, and AI.
How high can TIAGo++ go, and what’s its reach?
Pagès: TIAGo++ can reach the floor and up to 1.75m [5.74 ft.] high with each arm, thanks to the combination of its 7 DoF [seven degrees of freedom] arms and its lifting torso. The maximum extension of each arm is 92cm [36.2 in.]. In our experience, this workspace allows TIAGo to work in several environments like domestic, healthcare, and industry.
The TIAGo can extend in height, and each arm has a reach of about 3 ft. Source: PAL Robotics
What’s the advantage of seven degrees of freedom for TIAGo’s arms over six degrees?
Pagès: A 7-DoF arm is much better in this sense for people who will be doing manipulation tasks. Adding more DoFs means that the robot can arrive to more poses — positions and orientations — of its arm and end-effector that it couldn’t reach before.
Also, this enables developers to reduce singularities, avoiding non-desired abrupt movements. This means that TIAGo has more possibilities to move its arm and reach a certain pose in space, with a more optimal combination of movements.
What sensors and motors are in the robot? Are they off-the-shelf or custom?
Pagès: All our mobile-based platforms, like the TIAGo robot, combine many sensors. TIAGo has a laser and sonars to move around and localize itself in space, an IMU [inertial measurement unit], and an RGB-D camera in the head. It can have a force/torque sensor on the wrist, especially useful to work in HRI scenarios. It also has a microphone and a speaker.
TIAGo has current sensing in every joint of the arm, enabling a very soft, effortless torque control on each of the arms. The possibility of having an expansion panel with diverse connectors makes it really easy for developers to add even more sensors to it, like a thermal camera or a gripper camera, once they have TIAGo in their labs.
About the motors, TIAGo++ makes use our custom joints integrating high-quality commercial components and our own electronic power management and control. All motors also have encoders to measure the current motor position.
What’s the biggest challenge that a humanoid like TIAGo++ can help with?
Pagès: TIAGo++ can help with are those tasks that require bi-manipulation, in combination with navigation, perception, HRI, or AI. Even though it is true that a one-arm robot can already perform a wide range of tasks, there are many actions in our daily life that require of two arms, or that are more comfortably or quickly done with two arms rather than one.
For example, two arms are good for grasping and carrying a box, carrying a platter, serving liquids, opening a bottle or a jar, folding clothes, or opening a wardrobe while holding an object. In the end, our world and tools have been designed for the average human body, which is with two arms, so TIAGo++ can adapt to that.
As a research platform based on ROS, is there anything that isn’t open-source? Are navigation and manipulation built in or modular?
Pagès: Most software is provided either open-sourced or with headers and dynamic libraries so that customers can develop applications making use of the given APIs or using the corresponding ROS interfaces at runtime.
For example, all the controllers in TIAGo++ are plugins of ros_control, so customers can implement their own controllers following our public tutorials and deploy them on the real robot or in the simulation.
Moreover, users can replace any ROS package by their own packages. This approach is very modular, and even if we provide navigation and manipulation built-in, developers can use their own navigation and manipulation instead of ours.
Did PAL work with NVIDIA on design and interoperability, or is that an example of the flexibility of ROS?
Pagès: It is both an example of how easy is to expand TIAGo with external devices and how easy is to integrate in ROS these devices.
One example of applications that our clients have developed using the NVIDIA Jetson TX2 is the “Bring me a beer” task from the Homer Team [at RoboCup], at the University of Koblenz-Landau. They made a complete application in which TIAGo robot could understand a natural language request, navigate autonomously to the kitchen, open the fridge, recognize and select the requested beer, grasp it, and deliver it back to the person who asked for it.
As a company, we work with multiple partners, but we also believe that our users should be able to have a flexible platform that allows them to easily integrate off-the-shelf solutions they already have.
How much software support is there for human-machine interaction via a touchscreen?
Pagès: The idea behind integrating a touchscreen on TIAGo++ is to bring customers the possibility to implement their own graphical interface, so we provide full access to the device. We work intensively with researchers, and we provide platforms as open as our customers need, such as a haptic interface.
What do robotics developers need to know about safety and security?
Pagès: A list of safety measures and best practices are provided in the Handbook of TIAGo robot in order that customers ensure safety both around the robot and for the robot itself.
TIAGo also features some implicit control modes that help to ensure safety while operation. For example, an effort control mode for the arms is provided so that collisions can be detected and the arm can be set in gravity compensation mode.
Furthermore, the wrist can include a six-axis force/torque sensor providing more accurate feedback about collisions or interactions of the end effector with the environment. This sensor can be also used to increase the safety of the robot. We provide this information to our customers and developers so they are always aware about the safety measures.
Have any TIAGo users moved toward commercialization based on what they’ve learned with PAL’s systems?
Pagès: At the moment, from the TIAGo family, we commercialize the TIAGo Base for intralogistics automation in indoor spaces such as factories or warehouses.
Some configurations of the TIAGo robot have been tested in pilots in healthcare applications. In the EnrichMe H2020 EU Project, the robot gave assistance to old people at home autonomously for up to approximately two months.
In robotics competitions such as the ERL, teams have shown the quite outstanding performance of TIAGo in accomplishing specific actions in a domestic environment. Two teams ended first and third in the RoboCup@Home OPL 2019 in Sydney, Australia. The Homer Team won for the third time in a row using TIAGo — see it clean a toilet here.
The CATIE Robotics Team ended up third in the first world championship in which it participated. For instance, in one task, it took out the trash.
The TIAGo robot is also used for European Union Horizon 2020 experiments in which collaborative robots that combine mobility with manipulation are used in industrial scenarios. This includes projects such as MEMMO for motion generation, Co4Robots for coordination, and RobMoSys for open-source software development.
Besides this research aspect, we have industrial customers that are using TIAGo to improve their manufacturing procedures.
Pagès: With TIAGo++, besides the platform itself, you also get support, extra advanced software solutions, and assessment from a company that continues to be in the robotics sector since more than 15 years ago. Robots like the TIAGo++ also use our know-how both in software and hardware, a knowledge that the team has been gathering from the development of cutting-edge biped humanoids like the torque-controlled TALOS.
From a technical point of view, TIAGo++ was made very compact to suit environments shared with people such as homes. Baxter was a very nice entry-point platform and was not originally designed to be a mobile manipulator but a fixed one. TIAGo++ can use the same navigation used in our commercial autonomous mobile robot for intralogistics tasks, the TIAGo Base.
Besides, TIAGo++ is a fully customizable robot in all aspects: You can select the options you want in hardware and software, so you get the ideal platform you want to have in your robotics lab. For a mobile manipulator with two 7-DoF arms, force/torque sensors, ROS-based, affordable, and with community support, we believe TIAGo++ should be a very good option.
The TIAGo community is growing around the world, and we are sure that we will see more and more robots helping people in different scenarios very soon.
What’s the price point for TIAGo++?
Pagès: The starting price is around €90,000 [$100,370 U.S.]. It really depends on the configuration, devices, computer power, sensors, and extras that each client can choose for their TIAGo robot, so the price can vary.
Unlike industrial automation, which has been affected by a decline in automotive sales worldwide, robots for e-commerce order fulfillment continue to face strong demand. Warehouses, third-part logistics providers, and grocers are turning to robots because of competitive pressures, labor scarcities, and consumer expectations of rapid delivery. However, robotics developers and suppliers must distinguish themselves in a crowded market. The Robotics-as-a-Service, or RaaS, model is one way to serve retail supply chain needs, said Kindred Inc.
By 2025, there will be more than 4 million robots in operation at 50,000 warehouses around the world, predicted ABI Research. It cited improvements in computer vision, artificial intelligence, and deep learning.
“Economically viable mobile manipulation robots from the likes of RightHand Robotics and Kindred Systems are now enabling a wider variety of individual items to be automatically picked and placed within a fulfillment operation,” said ABI Research. “By combining mobile robots, picking robots, and even autonomous forklifts, fulfillment centers can achieve greater levels of automation in an efficient and cost-effective way.”
“Many robot technology vendors are providing additional value by offering flexible pricing options,” stated the research firm. “Robotics-as-a-Service models mean that large CapEx costs can be replaced with more accessible OpEx costs that are directly proportional to the consumption of technologies or services, improving the affordability of robotics systems among the midmarket, further driving adoption.”
Anjos: Sure. Kindred makes AI-enhanced, autonomous, piece-picking robots. Today, they’re optimized to perform the piece-picking process in a fulfillment center, for example, in a facility that fills individual e-commerce orders.
It’s important to understand our solution is more than a shiny robotic arm. Besides the part you can see — the robotic arm — our solution includes an AI platform to enable autonomous learning and in-motion planning, plus the latest in robotic technology, backed by our integration and support services.
The Robot Report visited Kindred at Automate/ProMat 2019 — what’s new since then?
Anjos: Since then, we’ve been hard at work on a new gripper optimized to handle rigid items like shampoo bottles and small cartons. We’ve got a ton of new AI models in development, and we continue to tune SORT’s performance using reinforcement learning.
What should engineers at user companies know about AutoGrasp and SORT?
Anjos: AutoGrasp is the unique combination of technologies behind SORT. There’s the AI-powered vision, grasping, and manipulation technology that allows the robot to quickly and accurately sort batches into discrete orders.
Then there’s the robotic device itself, which has been engineered for speed, agility and a wide range of motion. And finally, we offer WMS [warehouse management system] integration, process design, and deployment services, as well as ongoing maintenance and support, of course.
What use cases are better for collaborative robots or cobots versus standard industrial arms?
Anjos: Kindred’s solution is more than a robotic arm. It’s equipped with AI-enhanced computer vision, so it can work effectively in the dynamic conditions that we often find in a fulfillment environment. It responds to what it senses in real time and can even configure itself on the fly by changing the suction grip attachment while in motion.
The bottom line is, any solution that works for several different use cases is the result of compromises. That’s the nature of any multi-purpose device. We chose to optimize SORT for a specific step in the fulfillment process. That’s how we’re able to give it the ability to grasp, manipulate and place items with human-like accuracy — but with machine-like consistency and stamina.
And, like the people our robot works alongside of, SORT can learn on the job. Not only from its own experience, but based on the combined experience of other robots on the network as well.
RaaS can aid robotics adoption
Victor Anjos, VP of engineering, Kindred
Have you always offered both the AI and robotics elements of your products through an RaaS model?
Anjos: Yes, we have. Both are included in RaaS, and it has been an important part of our model.
Can you give an example of how RaaS works during implementation and then for ongoing support? What sorts of issues can arise?
Anjos: With our RaaS model, the assets are owned and maintained by Kindred, while the customer pays for the picking service as needed. Implementing RaaS eliminates the customer’s upfront capital expense.
Of course, the customer still needs to allocate operational and IT resources to make the RaaS implementation a success.
Is RaaS evolving or becoming more widespread and understood? Are there still pockets of supply chains that aren’t familiar with leasing models?
Anjos: RaaS is a relatively new concept for the supply chain industry, but it’s attracting a lot of attention. The financial model aligns with their operating budgets. And customers have an ability to scale the use of robots to meet peak demand, increasing asset utilization throughout the year.
Are there situations where it’s better to develop robots in-house or buy them outright than to use RaaS?
Anjos: Every customer I’ve spoken with has their hands full managing fulfillment operations. They’re not very eager to hire a team of AI developers to build a fleet of robots and hire engineers to maintain them! And Kindred isn’t interested in selling apparel, so it all works out!
What issues can arise during a RaaS relationship, and how much should providers and clients collaborate?
Anjos: Every supply chain system implementation is unique. During implementation, Kindred’s customer-success team works with our customer to understand performance requirements, integrate Kindred robots into their existing warehouse processes and systems, and provide onsite and remote support to ensure the success of each implementation.
Do you see RaaS spreading from order fulfillment to retail stores? What else would you like to see?
Anjos: That’s very possible. Robot use is increasing across the entire retail industry, and the RaaS model certainly makes adoption of this technology even easier and more beneficial.
For example, I can see how some of the robotic technologies developed for traditional fulfillment centers could be used in an urban or micro-fulfillment centers scenario.
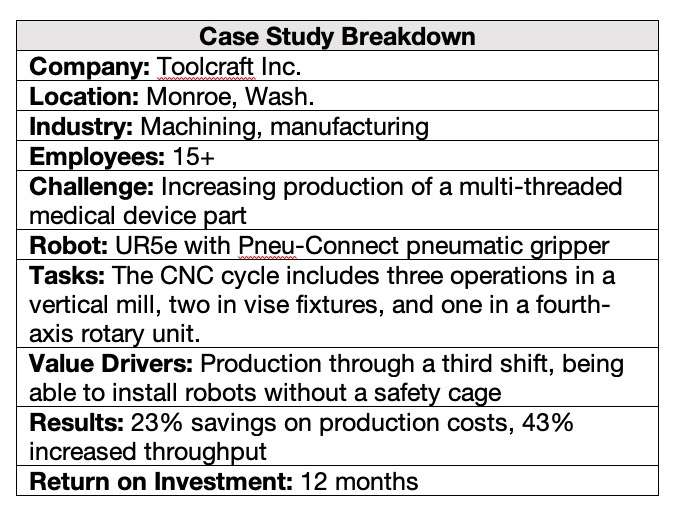
Toolcraft Inc., a small precision machining shop in Seattle, makes parts for industries including aerospace, defense, and medical. It needed help tending its CNC machine and ultimately turned to Universal Robots A/S’s e-Series collaborative robots.
Faced with labor shortages and a demanding manufacturing task, Toolcraft assessed its alternatives and worked with an integrator to apply a UR5e cobot to its process.
Challenge
Toolcraft needed to automate a three-step task to keep up with production demands, especially when a large medical device required it to add a third shift for round-the-clock operations. Finding workers is difficult in a region with 3% unemployment.
“Nobody wants to run on third shift around here,” said Steve Wittenberg, director of operations at Toolcraft. “When you put an ad out, you’re not getting very many responses.”
The company initially looked at traditional industrial robots but realized that it would have to add costly safety infrastructure.
“If we looked at just the robot hardware alone, that appeared to be a more cost-effective solution,” Wittenberg said. “But once we started factoring in the savings on not having to erect a safety cage – and the time saved on the ease of use, avoiding a lot of complex programming – Universal Robots ended up being the right solution.”
Solution
Toolcraft discussed its need for loading a medical device part into a CNC machine for multi-threading with Rapid Design Solutions, a certified systems integrator for UR cobots.
“When we heard that the repeatability of the UR5e was down to 30 microns, we were very excited,” said Troy Ojalehto, owner of Rapid Design Solutions. “That really competes in the same space as traditional industrial robots, so that was huge for us. I have not seen other cobots handling this level of precision with multi-op parts like this, with raw stock going in and completed precision parts coming out.”
Thanks to its force-feedback feature, the UR5e is able to make the part fit tightly in the CNC fixturing. “Using the force motion with freedom in the X,Y and rotational Z axes, we can force the part in there, and wiggle it, and program that compliance very easily to enable basically a human touch with the robot,” he said.
The UR+ program, which certifies that accessories such as grippers, vision systems, and software will work with UR cobots, helped speed up integration.
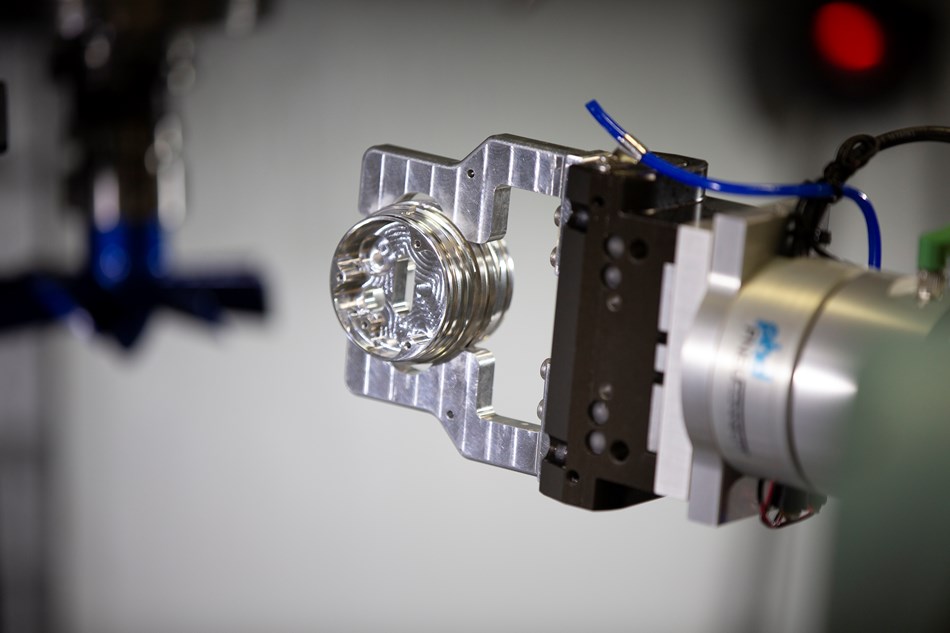
“For this application, we chose a Pneu-Connect pneumatic gripper,” said Ojalehtos. “A big factor is that it’s UR+ certified, which means it works with Universal right out of the box, with all gripper software integrated directly on the UR teach pendant, eliminating the need to do any script coding.”
Toolcraft chose the UR+ certified PneuConnect gripper, which works seamlessly with UR’s teach pendant. Source: Universal Robotics
Results at Toolcraft
“Some of the benefits we’ve seen right off were a significant production increase,” said Wittenberg. “We were able to staff that third shift and went from producing 255 parts a week to 370 parts per week. Along with that, we’re able to finish our year’s production seven weeks sooner, thus freeing up that machine to produce parts on other jobs.”
After six months, Toolcraft saw costs decline by 23%, and it now expects a return on investment on the cobot arm at about 12 months.
“We’re going to be able to be more competitive on a lot of the long-term work that we have,” Wittenberg said.
Since the UR5e cobot only tends parts for six minutes out of a 56-minute cycle, a Toolcraft engineer added a part rinsing and cleaning station after using Universal Robots‘ online training.
“After our automation engineer took the online UR Academy, he spent a few hours with the integrator and was able to add that station to the cobot cycle with no external help otherwise,” said Wittenberg. Universal Robots’ simulator also allowed Toolcraft to program most of the additional tasks without taking the cobot offline.
After certified systems integrator Troy Ojalehto (right) developed the initial application, Toolcraft automation engineer Brian Laulainen (left) was able to handle daily operations and build add-ons for the UR5e after training through the UR Academy. Source: Universal Robots
In addition, the company was easily able to use Universal Robots‘ I/O interfaces to control the pneumatic fixture and door actuators. “This greatly reduces the need for CNC wiring and preserves all the CNC’s standard safety functions,” Ojalehto said.
The installation has been so successful that Toolcraft is planning to install one cobot every year. “The fact that our own automation engineer is now able to go in and troubleshoot anything that comes up is going to be key in us meeting this goal,” Wittenberg said.
Toolcraft plans to automate tending a horizontal mill next. “That’s a potential challenge because of the mills using rotary tombstones that are swapped in and out of the milling machine, which creates some difficulties with fixturing,” said Wittenberg. “But we’re confident we can solve those using a Universal Robot and some innovation in fixturing.”
New Scale Robotics (NSR) has announced the first multi-tool mounting system for Universal Robots (UR) e-Series cobots. The NSR-MTM-3-URe Multi-Tool Mount (NSR-MTM) allows users to mount and control up to three grippers or other tools on one UR e-Series cobot.
The NSR-MTM System allows users to quickly set up and perform multiple processes with one robot. Benefits include:
Higher throughput in small part handling and inspection tasks.
Fewer large moves, for reduced cycle times without compromising safety.
The ability to automate more processes with fewer robots.
The NSR-MTM System includes both hardware and software. With low mass and small size, the hardware is compatible with UR’s smallest UR3e cobot. The integrated Freedrive button enables one-handed positioning to teach and set positions. The software enables fast setup and easy programming of up to three devices in one user interface on the UR teach pendant.
New Scale Robotics NSR-MTM-3-URe Multi-Tool Mount. | Credit: New Scale Robotics
NSR Devices Software is a new URCaps plugin for UR e-Series robots. Users can quickly add multiple tools to the single user interface, build tool processes with a few clicks, and run complex automation or inline inspection programs with ease. Other smart features include dynamic adjustment of tool center of gravity depending on mass of object picked.
The MTM hardware mounts to the UR robot tool flange with four screws and one connector to the internal tool port. Up to three tools are mounted on the MTM faces using the standard ISO 9409-1-50-4-M6 interfaces and M8 round connector. The MTM mount uses power and RS485 signals from the robot’s internal cables and slip rings. No external cables are required.
Applications include small part picking, movement, measurement, data logging, sorting and assembly. Used with the small and precise grippers from New Scale Robotics, the NSR-MTM System allows increased productivity from multiple tools while still fitting in the tightest spaces.
NSR Devices Software is a new URCaps plugin for UR e-Series robots. | Credit: New Scale Robotics
Universal Robots is opening 50 Authorized Training Centers, 13 of which will be located in North America. | Credit: Universal Robots
Universal Robots (UR) is launching Authorized Training Centers (ATCs) that offer classes spanning basic to advanced programming of UR cobots. UR is planning 50 fully authorized ATCs worldwide, 13 of which will be in North America. The first few ATCs in the U.S. have already been authorized and are now offered by the following UR sales partners:
Advanced Control Solutions in Marietta, Ga.
HTE Technologies in St. Louis, Missouri and Lenexa, Kansas
Ralph W. Earl Company in Syracuse, New York
Applied Controls in Malvern, Pa.
In addition to the ATCs hosted by UR partners, four training centers are also opening at UR’s offices in Ann Arbor, MI, Irving, TX, Garden City, NY, and Irvine, CA.
UR’s certified trainers will conduct training modules that cover a range of core and advanced cobot programming skills, including cobot scripting, industrial communication, and interface usage. Small class sizes with student-centered objectives and hands-on practice with UR robots ensure that participants come away with valuable skills they can apply immediately in their workplace.
For class schedules and more information, visit the UR Academy site. The modules of the ATC program include:
Core: For any user of a UR cobot who has completed the online modules. Covers safety set-up, basic applications and flexible redeployment.
Advanced: For cobot users, technical sales people, and integrators with a practical need to optimize applications or find new ways of deploying UR cobots. Covers scripting, advanced uses of force control and TCP, conveyor tracking and performance review.
Industrial Communication: For users and developers who need to integrate cobots with third-party devices. Covers modbus TCP, FTP server, dashboard server, socket communication, Ethernet/IP and Profinet.
Interfaces: For users and developers who need in-depth knowledge on how to interface with UR cobots using script interfaces. Covers UR scripting, socket communication, client interfaces (port 30001-30003), real time data exchange and XML/RPC.
Service & Troubleshooting: For users, technicians, and engineers wanting/needing a better understanding of the mechanical hardware used by UR cobots, how to diagnose issues and resolve them. Covers the configuration of the cobot arm, controller, and safety system as well as preventative maintenance, system troubleshooting, and replacement of parts.
UR’s certified trainers will conduct training modules that cover a range of core and advanced cobot programming skills, including cobot scripting, industrial communication, and interface usage. | Credit: Universal Robots
“Now, current and potential customers can get in-person training, customizing their specific applications and needs,” said Stuart Shepherd, Regional sales director of Universal Robots’ Americas division. “Not only are our partners excited about this opportunity, they’re virtually lining up to be the next rollout.”
“From a business perspective, being able to offer this type of training also improves our place in the market, ensuring that current and potential customers start to rely on us as automation experts,” said Cale Harbour, Vice President of Product Marketing at Advanced Control Solutions. “As our customers build their knowledge, they can deploy the technology faster and see the benefits to their production – and their bottom line – quicker. It’s a win-win for everybody involved.”
“Using this approach, we’ve expanded our role as supplier to assist with the application process as well,” said Marv Dixon, vice president of business development and sales, HTE Technologies. “The Training Center has also provided us with the perfect scenario in which we can introduce other products that our customers might not have otherwise considered, such as grippers and conveyors. With the Authorized Training Center distinction, we’ve become a resource that our customers can count on for up-to-date, accessible training and support.”
Vegebot, a vegetable-picking robot, uses machine learning to identify and harvest a commonplace, but challenging, agricultural crop.
A team at the University of Cambridge initially trained Vegebot to recognize and harvest iceberg lettuce in the laboratory. It has now been successfully tested in a variety of field conditions in cooperation with G’s Growers, a local fruit and vegetable co-operative.
Although the prototype is nowhere near as fast or efficient as a human worker, it demonstrates how the use of robotics in agriculture might be expanded, even for crops like iceberg lettuce which are particularly challenging to harvest mechanically. The researchers published their results in The Journal of Field Robotics.
Crops such as potatoes and wheat have been harvested mechanically at scale for decades, but many other crops have to date resisted automation. Iceberg lettuce is one such crop. Although it is the most common type of lettuce grown in the U.K., iceberg is easily damaged and grows relatively flat to the ground, presenting a challenge for robotic harvesters.
“Every field is different, every lettuce is different,” said co-author Simon Birrell from Cambridge’s Department of Engineering. “But if we can make a robotic harvester work with iceberg lettuce, we could also make it work with many other crops.”
“For a human, the entire process takes a couple of seconds, but it’s a really challenging problem for a robot.” — Josie Hughes, University of Cambridge report co-author
“At the moment, harvesting is the only part of the lettuce life cycle that is done manually, and it’s very physically demanding,” said co-author Julia Cai, who worked on the computer vision components of the Vegebot while she was an undergraduate student in the lab of Dr Fumiya Iida.
The Vegebot first identifies the “target” crop within its field of vision, then determines whether a particular lettuce is healthy and ready to be harvested. Finally, it cuts the lettuce from the rest of the plant without crushing it so that it is “supermarket ready.”
“For a human, the entire process takes a couple of seconds, but it’s a really challenging problem for a robot,” said co-author Josie Hughes.
Vegebot designed for lettuce-picking challenge
The Vegebot has two main components: a computer vision system and a cutting system. The overhead camera on the Vegebot takes an image of the lettuce field and first identifies all the lettuces in the image. Then for each lettuce, the robot classifies whether it should be harvested or not. A lettuce might be rejected because it’s not yet mature, or it might have a disease that could spread to other lettuces in the harvest.
Vegebot uses machine vision to identify heads of iceberg lettuce. Credit: University of Cambridge
The researchers developed and trained a machine learning algorithm on example images of lettuces. Once the Vegebot could recognize healthy lettuce in the lab, the team then trained it in the field, in a variety of weather conditions, on thousands of real lettuce heads.
A second camera on the Vegebot is positioned near the cutting blade, and helps ensure a smooth cut. The researchers were also able to adjust the pressure in the robot’s gripping arm so that it held the lettuce firmly enough not to drop it, but not so firm as to crush it. The force of the grip can be adjusted for other crops.
“We wanted to develop approaches that weren’t necessarily specific to iceberg lettuce, so that they can be used for other types of above-ground crops,” said Iida, who leads the team behind the research.
In the future, robotic harvesters could help address problems with labor shortages in agriculture. They could also help reduce food waste. At the moment, each field is typically harvested once, and any unripe vegetables or fruits are discarded.
However, a robotic harvester could be trained to pick only ripe vegetables, and since it could harvest around the clock, it could perform multiple passes on the same field, returning at a later date to harvest the vegetables that were unripe during previous passes.
“We’re also collecting lots of data about lettuce, which could be used to improve efficiency, such as which fields have the highest yields,” said Hughes. “We’ve still got to speed our Vegebot up to the point where it could compete with a human, but we think robots have lots of potential in agri-tech.”
Iida’s group at Cambridge is also part of the world’s first Centre for Doctoral Training (CDT) in agri-food robotics. In collaboration with researchers at the University of Lincoln and the University of East Anglia, the Cambridge researchers will train the next generation of specialists in robotics and autonomous systems for application in the agri-tech sector. The Engineering and Physical Sciences Research Council (EPSRC) has awarded £6.6 million ($8.26 million U.S.) for the new CDT, which will support at least 50 Ph.D. students.
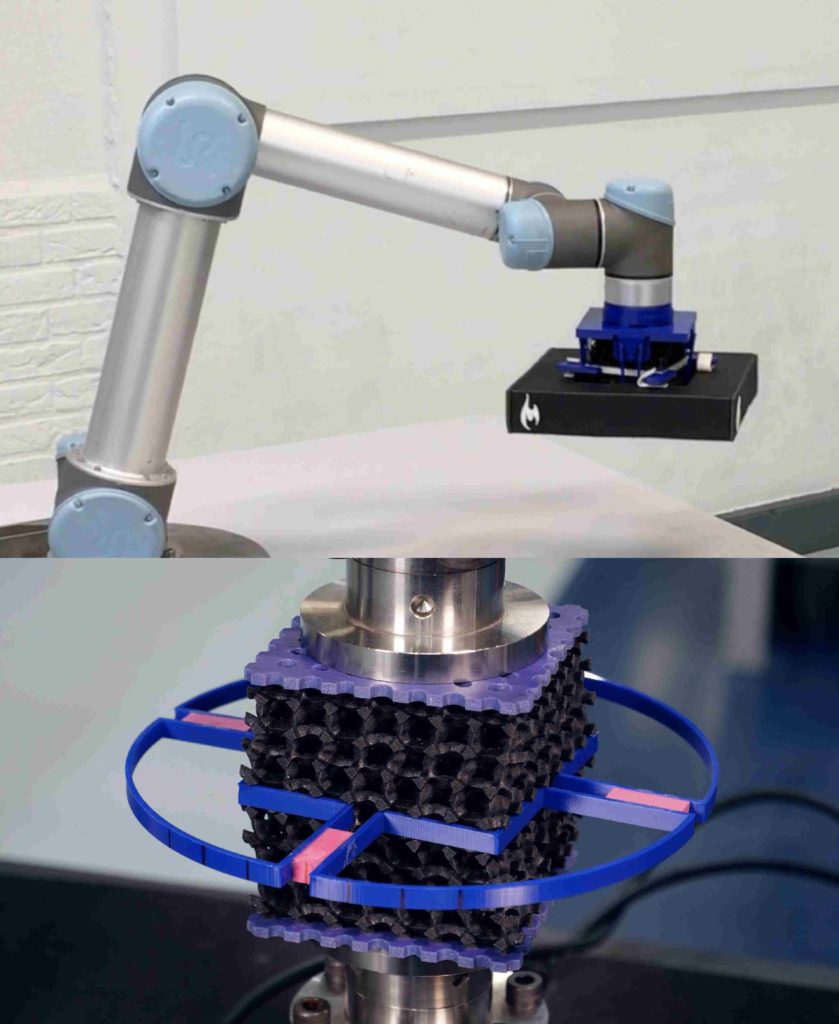
Researchers at the Delft University of Technology in the Netherlands have developed highly programmable soft actuators that, similar to the human hand, combine soft and hard materials to perform complex movements. These materials have great potential for soft robots that can safely and effectively interact with humans and other delicate objects, said the TU Delft scientists.
“Robots are usually big and heavy. But you also want robots that can act delicately, for instance, when handling soft tissue inside the human body. The field that studies this issue, soft robotics, is now really taking off,” said Prof. Amir Zadpoor, who supervised the research presented the July 8 issue of Materials Horizons.
“What you really want is something resembling the features of the human hand including soft touch, quick yet accurate movements, and power,” he said. “And that’s what our soft 3D-printed programmable materials strive to achieve.”
Tunability
Owing to their soft touch, soft robotics can safely and effectively interact with humans and other delicate objects. Soft programmable mechanisms are required to power this new generation of robots. Flexible mechanical metamaterials, working on the basis of mechanical instability, offer unprecedented functionalities programmed into their architected fabric that make them potentially very promising as soft mechanisms, said the TU Delft researchers.
“However, the tunability of the mechanical metamaterials proposed so far have been very limited,” said first author Shahram Janbaz.
Programmable soft actuators
“We now present some new designs of ultra-programmable mechanical metamaterials, where not only the actuation force and amplitude, but also the actuation mode could be selected and tuned within a very wide range,” explained Janbaz. “We also demonstrate some examples of how these soft actuators could be used in robotics, for instance as a force switch, kinematic controllers, and a pick-and-place end-effector.”
A conventional robotic arm is modified using the developed soft actuators to provide soft touch during pick-and-place tasks. Source: TU Delft
Buckling
“The function is already incorporated in the material,” Zadpoor explained. “Therefore, we had to look deeper at the phenomenon of buckling. This was once considered the epitome of design failure, but has been harnessed during the last few years to develop mechanical metamaterials with advanced functionalities.”
“Soft robotics in general and soft actuators in particular could greatly benefit from such designer materials,” he added. “Unlocking the great potential of buckling-driven materials is, however, contingent on resolving the main limitation of the designs presented to date, namely the limited range of their programmability. We were able to calculate and predict higher modes of buckling and make the material predisposed to these higher modes.”
3D printing
“So, we present multi-material buckling-driven metamaterials with high levels of programmability,” said Janbaz. “We combined rational design approaches based on predictive computational models with advanced multi-material additive manufacturing techniques to 3D print cellular materials with arbitrary distributions of soft and hard materials in the central and corner parts of their unit cells.”
“Using the geometry and spatial distribution of material properties as the main design parameters, we developed soft mechanical metamaterials behaving as mechanisms whose actuation force and actuation amplitude could be adjusted,” he said.
Editor’s note: This article republished from TU Delft.
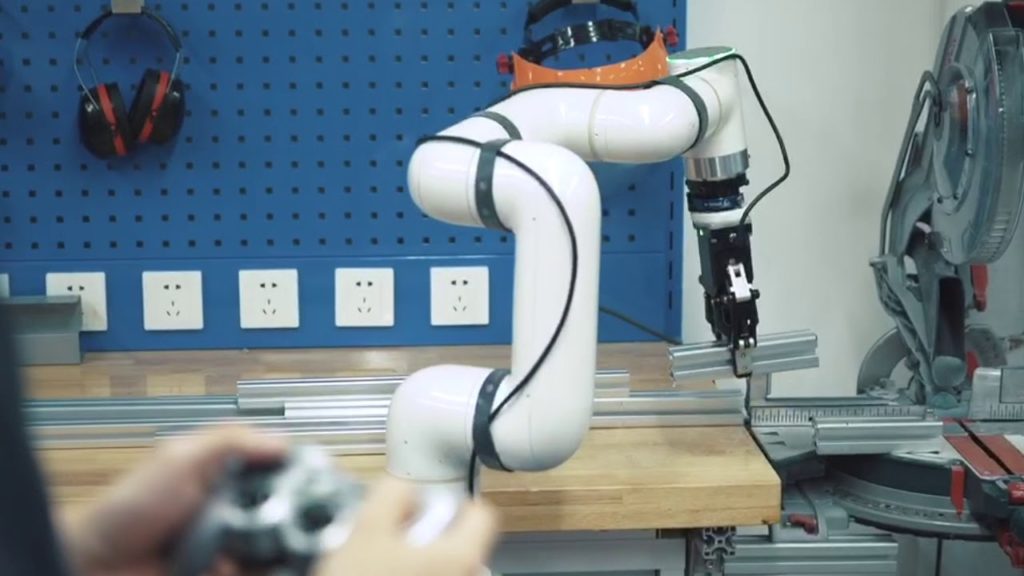
Small and midsize enterprises are just beginning to benefit from collaborative robot arms or cobots, which are intended to be safer and easier to use than their industrial cousins. However, high costs and the difficulty of customization are still barriers to adoption. Elephant Robotics this week announced its Catbot, which it described as an “all in one safe robotic assistant.”
The cobot has six degrees of freedom, has a 600mm (23.6 in.) reach, and weighs 18kg (39.68 lb.). It has a payload capacity of 5kg (11 lb.). Elephant Robotics tested Catbot in accordance with international safety standards EN ISO 13848:2008 PL d and 10218-1: 2011-Clause 5.4.3 for human-machine interaction. A teach pendant and a power box are optional with Catbot.
Elephant Robotics CEO Joey Song studied in Australia. Upon returning home, he said, he “wanted to create a smaller in size robot that will be safe to operate and easy to program for any business owner with just a few keystrokes.”
Song founded Elephant Robotics in 2016 in Shenzhen, China, also known as “the Silicon Valley of Asia.” It joined the HAX incubator and received seed funding from Princeton, N.J.-based venture capital firm SOSV.
Song stated that he is committed in making human-robot collaboration accessible to any small business by eliminating the limitations of high price or requirements for highly skilled programming. Elephant Robotics also makes the Elephant and Panda series cobots for precise industrial automation.
Catbot includes voice controls
Repetitive tasks can lead to boredom, accidents, and poor productivity and quality, noted Elephant Robotics. Its cobots are intended to free human workers to be more creative. The company added that Catbot can save on costs and increase workloads.
Controlling robots, even collaborative robots, can be difficult. This is even harder for robots that need to be precise and safe. Elephant Robotics cited Facebook’s new PyRobot framework as an example of efforts to simplify robotic commands.
Catbot is built on an open platform so developers can share the skills they’ve developed, allowing others to use them or build on top of them.
Elephant Robotics claimed that it has made Catbot smarter and safer than other collaborative robots, offering “high efficiency and flexibility to various industries.” It includes force sensing and voice-command functions.
In addition, Catbot has an “all-in-one” design, cloud-based programming, and quick tool changing.
The catStore virtual shop offers a set of 20 basic skills. Elephant Robotics said that new skills could be developed for specific businesses, and they can be shared with other users on its open platform.
Catbot is designed to provide automated assistance to people in a variety of SMEs. Source: Elephant Robotics
Application areas
Elephant Robotics said its cobots are suitable for assembly, packaging, pick-and-place, and testing tasks, among others. Its arms work with a variety of end effectors. To increase its flexibility, the company said, Catbot is designed to be easy to program, from high-precision tasks to covering “hefty ground projects.”
According to Elephant Robotics, the Catbot can used for painting, photography, and giving massages. It could also be a personal barista or play with humans in a table game. In addition, Catbot could act as a helping hand in research workshops or as an automatic screwdriver, said the company.
Elephant Robotics’ site said it serves the agricultural and food, automotive, consumer electronics, educational and research, household device, and machining markets.
Catbot is available now for preorder, with deliveries set to start in August 2019. Contact Elephant Robotics for more information on price or tech specifications atsales@elephantrobotics.com.