Optimus Ride, a self-driving vehicle technology startup that spun out of MIT in 2015, today launched its driverless shuttle service inside a geo-fenced area at the Brooklyn Navy Yard. The 300-acre shipyard and industrial complex has more than 400 manufacturing businesses and 10,000 employees onsite.
Six Optimus Ride driverless shuttles are now transporting passengers inside a 1-mile area between the NYC Ferry stop at Dock 72 and the Yard’s Cumberland Gate at Flushing Avenue. This area acts as a connection point for thousands of daily commuters. Optimus Ride said the service, which is free and runs seven days a week, is expected to transport some 500 passengers daily.
“Launching our self-driving vehicle system in New York at the Brooklyn Navy Yard is yet another validation that not only is Optimus Ride’s system a safe, efficient means of transportation, but also that autonomous vehicles can solve real-world problems in structured environments – today,” said Dr. Ryan Chin, CEO and co-founder of Optimus Ride. “In addition, our system will provide access to and experience with autonomy for thousands of people, helping to increase acceptance and confidence of this new technology, which helps move the overall industry forward.”
Initially, Optimus Ride said there will be a safety driver and software operator in the vehicle while in operation. Eventually those safety operators will be removed, the company said, and engineers at its Boston office will remotely monitor the shuttles. Chin said the shuttles are programmed to drive between 10-15 miles per hour, which adheres to Navy Yard speed limits.
Aerial view of the Brooklyn Navy Yard, which now has an autonomous shuttle service from Optimus Ride. | Credit: Optimus Ride
According to the New York Post, demand was initially slow for the driverless shuttle service today. But those passengers who did ride were happy with the service. According to the New York Post:
“One user, 46-year-old Carey Booth who commutes by ferry from her home in Astoria to her job at the Brooklyn Navy Yard every day, took a ride in the shuttle while on her way to work.
“The ride was extremely smooth, smoother than the Navy Yard buses,” Booth said. “The car adjusted really well on turns and when other cars were driving nearby. It seems like they’ve tested it really extensively.”
Booth said that she’d “love” to see the fleet expand its coverage.
“I’d be cool with these cars being outside the yard at some point. I’d definitely love to see them all over the yard first though, because right now it’s just from point A to point B,” Booth said, adding that “I trust these cars more than I trust the drivers out on the streets.”
Carlos de Jesus, 38, gave the shuttle a spin before he headed to his volunteer job in Greenpoint.
“This was my first time ever in a self-driven vehicle. If no one had told me, I wouldn’t have known it was self-driven,” said de Jesus, who lives nearby. “Breaking and turning might be a little quicker than you’re used to, but everything was fine.”
De Jesus called it a “smooth ride.”
Optimus Ride’s autonomous shuttle operating in the Union Point development in South Weymouth, MA. | Credit: Optimus Ride
Optimus Ride testing in other states
Optimus Ride is testing its Level 4 shuttles in other states as well. In California, Optimus Ride is heading to Paradise Valley Estates, a gated community in Fairfield, California. There it will provide self-driving tours to prospective residents and a shuttle service to residents to other locations within the property. This is expected to start in Q2 2019.
In June 2019, Optimus Ride began providing tenants at Brookfield Properties’ Halley Rise, a new $1.4 billion mixed-use development in Reston, Virginia, with a autonomous shuttle service to locations within the property. And for the two-plus years, the company has been testing in two Massachusetts locations: in Boston’s Seaport District and South Weymouth. The company says its shuttles have completed over 20,000 trips since 2015.
Optimus Ride raised an $18 million Series A round in November 2017 that was led by Greycroft Partners. Other participating investors included Emerson Collective, Fraser McCombs Capital, and MIT Media Lab director Joi Ito. Then in April 2019 it raised another $20.7 million in a prospective $60 million round.
Other companies working on autonomous vehicles that operate in geo-fenced areas include May Mobility, Navya, Perrone Robotics and Voyage. May Mobility, which raised $22 million in February 2019, is testing its shuttles across the US, while Voyage is targeting retirement communities. Navya, however, recently changed its strategic direction. Instead of deploying its own autonomous shuttles, Navya is now licensing its technology to third-party companies.
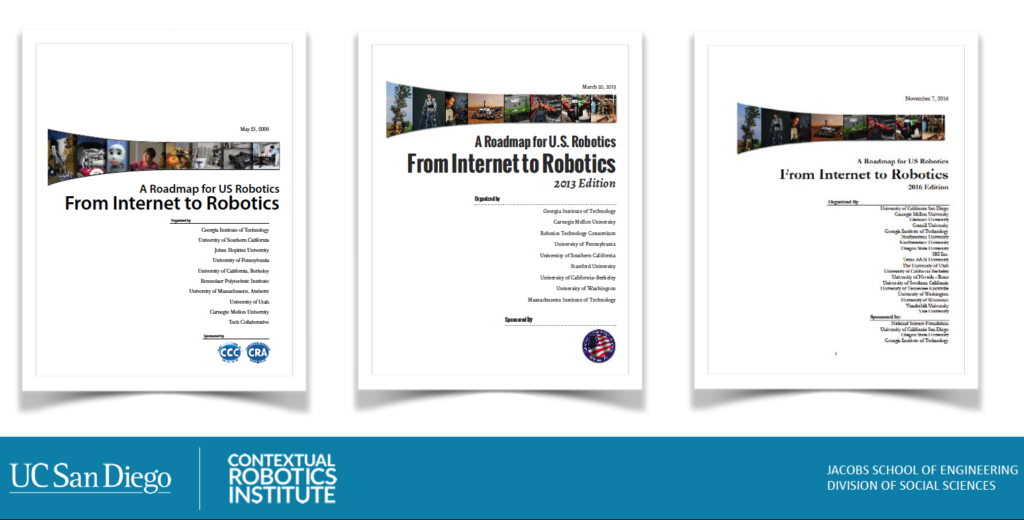
The U.S. National Robotics Roadmap was first created 10 years ago. Since then, government agencies, universities, and companies have used it as a reference for where robotics is going. The first roadmap was published in 2009 and then revised in 2013 and 2016. The objective is to publish the fourth version of the roadmap by summer 2020.
The team developing the U.S. National Robotics Roadmap has put out a call to engage about 150 to 200 people from academia and industry to ensure that it is representative of the robotics community’s view of the future. The roadmap will cover manufacturing, service, medical, first-responder, and space robotics.
The revised roadmap will also include considerations related to ethics and workforce. It will cover emerging applications, the key challenges to progress, and what research and development is needed.
Join community workshops
Three one-and-a-half-day workshops will be organized for community input to the roadmap. The workshops will take place as follows:
Sept. 11-12 in Chicago (organized by Nancy Amato, co-director of the Parasol Lab at Texas A&M University and head of the Department of Computer Science at the University of Ilinois at Urbana-Champaign)
Oct. 17-18 in Los Angeles (organized by Maja Mataric, Chan Soon-Shiong distinguished professor of computer science, neuroscience, and pediatrics at the University of Southern California)
Nov. 15-16 in Lowell, Mass. (organized by Holly Yanco, director of the NERVE Center at the University of Massachusetts Lowell)
Participation in these workshops will be by invitation only. To participate, please submit a white paper/position statement of a maximum length of 1.5 pages. What are key use cases for robotics in a five-to-10-year perspective, what are key limitations, and what R&D is needed in that time frame? The white paper can address all three aspects or focus on one of them. The white paper must include the following information:
Name, affiliation, and e-mail address
A position statement (1.5 pages max)
Please submit the white paper as regular text or as a PDF file. Statements that are too long will be ignored. Position papers that only focus on current research are not appropriate. A white paper should present a future vision and not merely discuss state of the art.
White papers should be submitted by end of the day Aug. 15, 2019, to roadmapping@robotics-vo.org. Late submissions may not be considered. We will evaluate submitted white papers by Aug. 18 and select people for the workshops by Aug. 19.
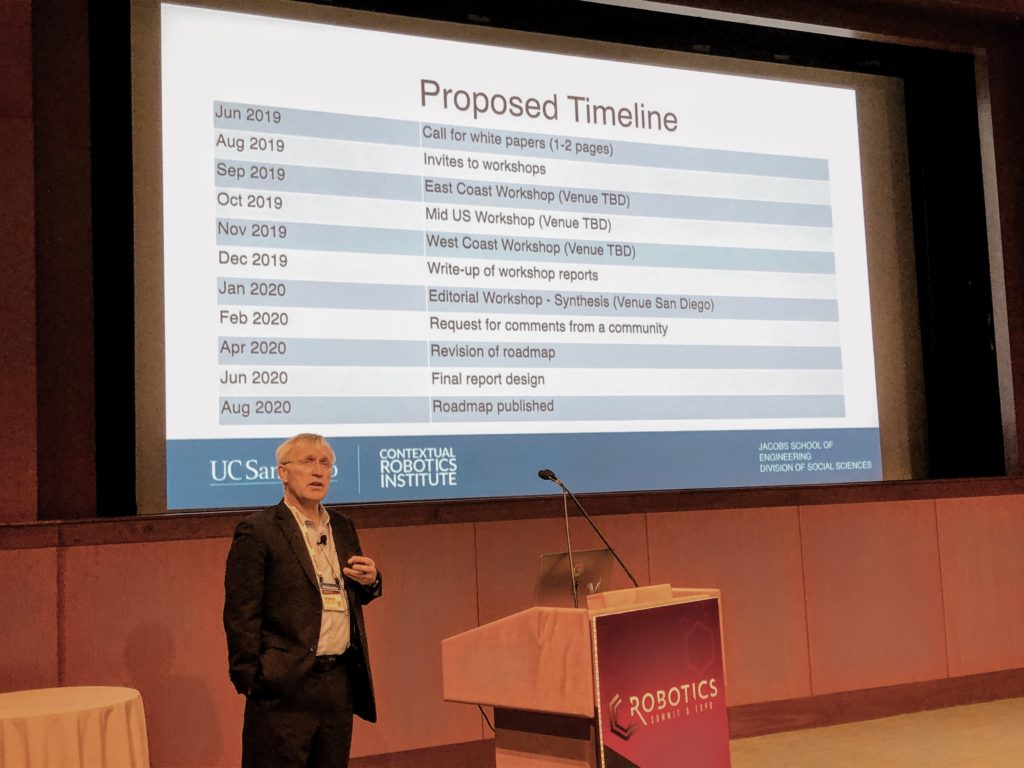
Roadmap revision timeline
The workshop reports will be used as the basis for a synthesis of a new roadmap. The nominal timeline is:
August 2019: Call for white papers
September – November 2019: Workshops
December 2019: Workshops reports finalized
January 2020: Synthesis meeting at UC San Diego
February 2020: Publish draft roadmap for community feedback
April 2020: Revision of roadmap based on community feedback
May 2020: Finalize roadmap with graphics design
July 2020: Publish roadmap
If you have any questions about the process, the scope, etc., please send e-mail to Henrik I Christensen at hichristensen@eng.ucsd.edu.
Henrik I Christensen spoke at the Robotics Summit & Expo in Boston.
PneuConnect with GRT gripper on a UR cobot. Source: PHD
PHD Inc. this month added three products to its line of grippers and accessories for industrial automation. They are intended to help robots grip large objects, make positioning and programming easy for maximum efficiency, and facilitate machine tending. PHD’s products are designed to work with collaborative robot arms, or cobots, from Universal Robots A/S.
Fort Wayne, In.-based PHD said it sells grippers, linear slides, and the widest range of long-life, robust actuators in the industry. It also offers engineering software and Internet-based tools to save design time, support from factory-trained application and industry specialists, and rapid product delivery.
PHD adds jaw-travel option to GRR line
The company has added a 300mm (11.81 in.) jaw-travel model of its Series GRR high-capacity pneumatic grippers. These parallel grippers are designed to provide high grip force, five long-jaw travels, and high loads.
Because the Guardian grippers can withstand high impact and shock loads, they are suitable for applications such as small engine block manufacturing, automotive wheel-rim manufacturing, and foundry applications, said PHD.
Also available is the Series EGRR high-capacity electric parallel grippers, which offer many of the same benefits as the pneumatic design.
Pneu-Connect X2 with dual grippers available
PHD also announced the release of Pneu-Connext X2 kits with dual grippers. They can be mounted to UR cobots for maximum efficiency in automation performance.
The Pneu-Connect X2 includes PHD’s Freedrive feature, which interfaces with UR cobots for easy positioning and programming. The kits come in the following standard combinations:
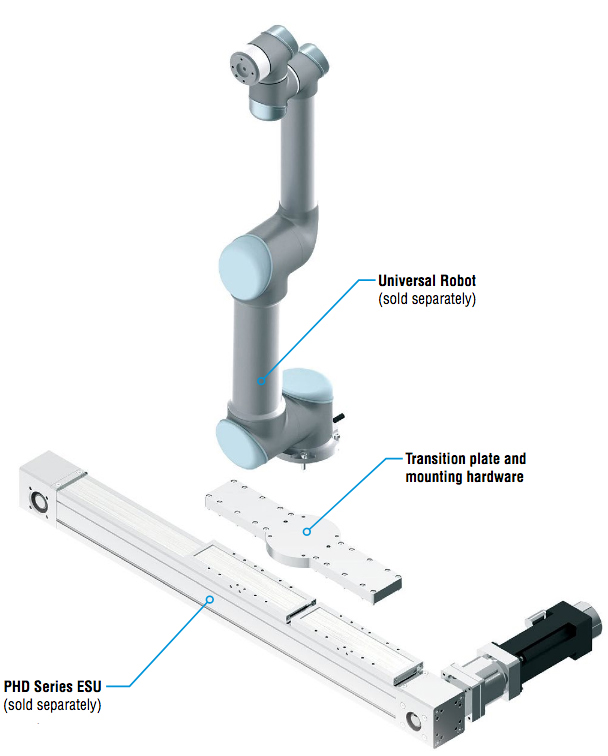
Transition plates connect UR directly to linear actuator
PHD’s transition plate allows a Universal Robot arm to be directly attached to the new PHD Series ESU electric belt-driven linear actuator. The company said it offers a transition plate for each size of UR arm, “taking machine tending to a whole new level.”
This transition plate provides a seventh axis for UR arms with the ESU linear actuator. Source: PHD
With a cataloged stroke of up to 5500mm (216.53 in.), users can increase the working area of a UR10 arm by 10 times.
Researchers from North Carolina State University and Elon University have developed a technique that allows them to remotely control the movement of soft robots, lock them into position for as long as needed, and later reconfigure the robots into new shapes. The technique relies on light and magnetic fields.
“We’re particularly excited about the reconfigurability,” said Joe Tracy, a professor of materials science and engineering at NC State and corresponding author of a paper on the work. “By engineering the properties of the material, we can control the soft robot’s movement remotely; we can get it to hold a given shape; we can then return the robot to its original shape or further modify its movement; and we can do this repeatedly. All of those things are valuable, in terms of this technology’s utility in biomedical or aerospace applications.”
LEDs make soft robots pliable
For this work, the researchers used soft robots made of a polymer embedded with magnetic iron microparticles. Under normal conditions, the material is relatively stiff and holds its shape.
However, researchers can heat up the material using light from a light-emitting diode (LED), which makes the polymer pliable. Once pliable, researchers demonstrated that they could control the shape of the robot remotely by applying a magnetic field. After forming the desired shape, researchers could remove the LED light, allowing the robot to resume its original stiffness — effectively locking the shape in place.
By applying the light a second time and removing the magnetic field, the researchers could get the soft robots to return to their original shapes. Or they could apply the light again and manipulate the magnetic field to move the robots or get them to assume new shapes.
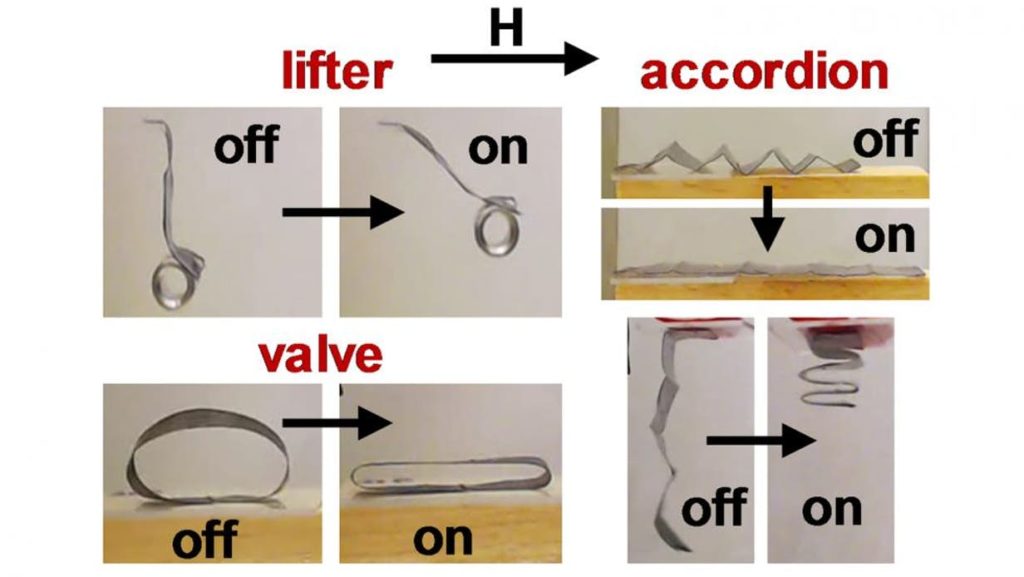
In experimental testing, the researchers demonstrated that the soft robots could be used to form “grabbers” for lifting and transporting objects. The soft robots could also be used as cantilevers, or folded into “flowers” with petals that bend in different directions.
“We are not limited to binary configurations, such as a grabber being either open or closed,” said Jessica Liu, first author of the paper and a Ph.D. student at NC State. “We can control the light to ensure that a robot will hold its shape at any point.”
Iron microparticles can be used to make soft robots move. Source: North Carolina State University
Streamlining robot design
In addition, the researchers developed a computational model that can be used to streamline the soft robot design process. The model allows them to fine-tune a robot’s shape, polymer thickness, the abundance of iron microparticles in the polymer, and the size and direction of the required magnetic field before constructing a prototype to accomplish a specific task.
“Next steps include optimizing the polymer for different applications,” Tracy said. “For example, engineering polymers that respond at different temperatures in order to meet the needs of specific applications.”
Authors and support
The paper, “Photothermally and Magnetically Controlled Reconfiguration of Polymer Composites for Soft Robotics,” appears in the journal Science Advances. In addition Liu as first author, the paper was co-authored by Jonathan Gillen, a former undergraduate at NC State; Sumeet Mishra, a former Ph.D. student at NC State; and Benjamin Evans, an associate professor of physics at Elon University.
The work was done with support from the National Science Foundation (NSF) under grants CMMI-1663416 and CMMI-1662641. The work was also supported by the Research Triangle MRSEC, which is funded by NSF under grant DMR-1121107; and by NC State’s Analytical Instrumentation Facility and the Duke University Shared Materials Instrumentation Facility, which are supported by the State of North Carolina and NSF grant ECCS-1542015.
An international team of scientists has developed an ultra-thin, wearable electronic device that facilitates smooth communication between humans and machines. The researchers said the new device is easy to manufacture and imperceptible when worn. It could be applied to human skin to capture various types of physical data for better health monitoring and early disease detection, or it could enable robots to perform specific tasks in response to physical cues from humans.
Wearable human-machine interfaces have had challenges — some are made from rigid electronic chips and sensors that are uncomfortable and restrict the body’s motion, while others consist of softer, more wearable elastic materials but suffer from slow response times.
While researchers have developed thin inorganic materials that wrinkle and bend, the challenge remains to develop wearable devices with multiple functions that enable smooth communication between humans and machines.
The team that wrote the paper included Kyoseung Sim, Zhoulyu Rao; Faheem Ershad; Jianming Lei, Anish Thukral, Jie Chen, and Cunjiang Yu at University of Houston. It also included Zhanan Zou and Jianling Xiao at University of Colorado, Boulder, and Qing-An Huang at Southeast University in Nanjing, China.
Wearable nanomembrane reads human muscle signals
Kyoseung Sim and company have designed a nanomembrane made from indium zinc oxide using a chemical processing approach that allows them to tune the material’s texture and surface properties. The resulting devices were only 3 to 4 micrometers thick, and snake-shaped, properties that allow them to stretch and remain unnoticed by the wearer.
When worn by humans, the devices could collect signals from muscle and use them to directly guide a robot, enabling the user to feel what the robot hand experienced. The devices maintain their function when human skin is stretched or compressed.
The researchers also found that sensors made from this nanomembrane material could be designed to monitor UV exposure (to mitigate skin disease risk) or to detect skin temperature (to provide early medical warnings), while still functioning well under strain.
Editor’s note: This month’s print issue of The Robot Report, which is distributed with Design World, focuses on exoskeletons. It will be available soon.
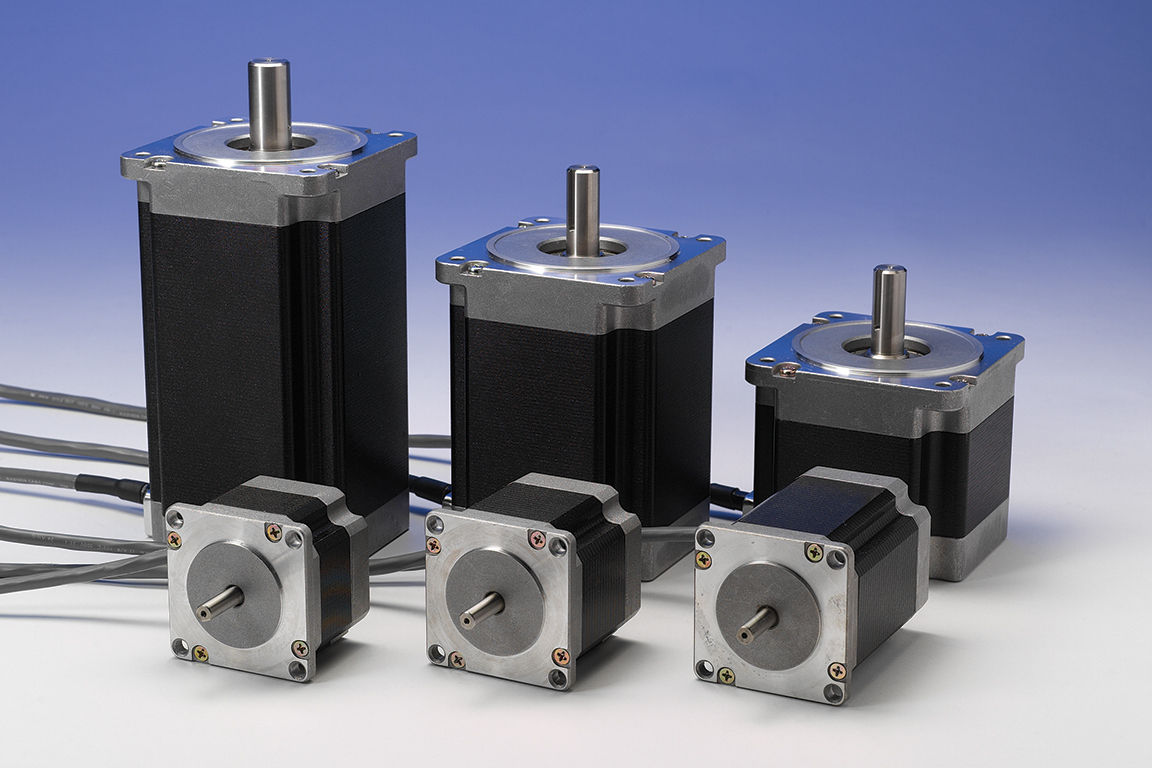
Step motors and drives from Applied Motion Products
The mistakes outlined here by Eric Rice, national marketing director at Applied Motion Products, have been corrected countless times by thousands of step motor users around the world. Avoid these mistakes with the presented solutions — and make your next application a successful one.
Step motors offer the automation industry a cost-effective and simple method to digitally control motion in a wide range of applications — including packaging equipment, 3D printers, material handling and sorting lines, bench-top CNC machines, and more. They serve as critical components of many rotary and linear positioning axes.
The cost-performance benefits of step motors lie in their simplicity and their ability to position accurately in open-loop control schemes, without any feedback from the motor to the controller. Getting the optimal performance benefits of an open-loop stepper system requires understanding how to specify and install a step motor into an application. Following are six common mistakes that step motor users, both novice and experienced, can easily avoid.
1. ‘The torque spec of the motor is higher than what I’m seeing in practice.’
After calculating the torque required to move the load in an application, a user selects a step motor based on (1) the holding torque specification of the motor or (2) the speed-torque curve. Once mounted and coupled to the load, the motor doesn’t produce the amount of expected torque.
The first mistake is using the holding torque as a measure of performance to specify the step motor. Holding torque defines the torque a motor produces when maintaining a position and not moving. It is generally a poor indicator of the torque the motor produces when moving.
When a step motor starts moving, the produced torque falls precipitously from the holding torque value, even after just a few rpms. As speed increases, the torque falls further. For this reason, don’t select a motor based on holding torque alone. Instead, refer to published speed-torque curves.
Shown here are step motors from Applied Motion Products with various stack lengths.
The second mistake is failing to understand the nature of speed-torque curves. A speed-torque curve represents the torque at which the step motor stalls. When a motor stalls, the rotor loses synchronization with the stator, and the shaft stops turning.
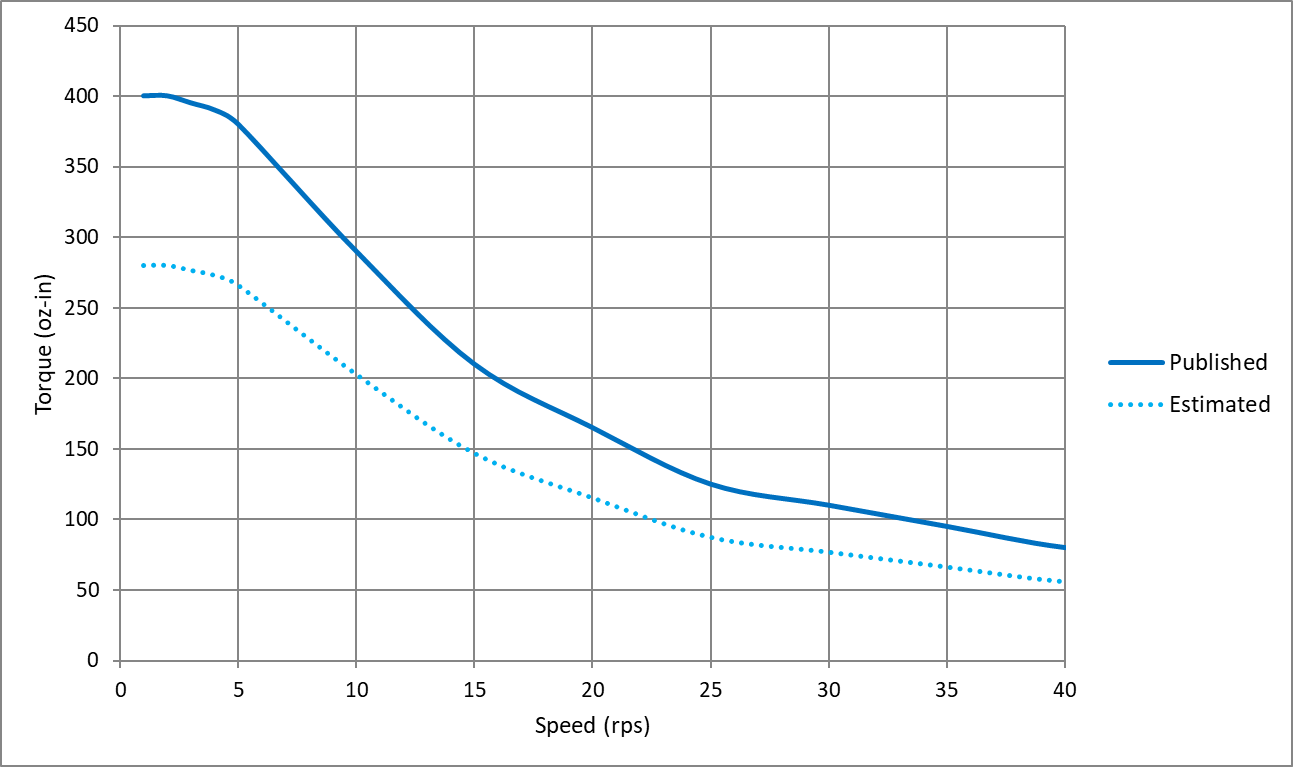
To ensure the step motor continues to turn and provides enough torque to move the load, evaluate the speed-torque curves by estimating a margin of safety. A simple way to do this is by imagining a line parallel to the speed-torque curve at roughly 1/2 to 2/3 the height of the published curve. This imaginary line represents an amount of torque that a step motor can reliably produce with minimal risk of stalling. See Figure 1 below for more on this.
Figure 1 — typical speed-torque curve of a step motor. In published data from the manufacturer, only the solid line is shown, which indicates stall torque versus speed. The user must estimate a usable torque range as shown by the dashed line.
2. ‘The step motor is so hot; there must be something wrong with it.’
Step motors are designed to run hot. The most common insulation class used in step motors is Class B, which is rated for operation up to 130° C. This means that the surface temperature of a step motor can reach 90° C or more before failing. This temperature is much hotter than a person could touch without burning the skin. For this reason, mount motors away from areas with a high chance of human contact.
Step motors are designed to run at high temperatures because of their use in open-loop control systems. Because an open-loop step motor operates without any current feedback (or velocity or position feedback), the current supplied by the drive is constant, regardless of the torque demand.
To get the most torque from step motors, manufacturers specify them with the Class B insulation in mind; so, current ratings are designed to maximize torque output without overheating. The end result is that step motors produce a lot of torque … but they also get quite hot in doing so.
3. ‘Can I use a 12V power supply to power my motor and drive?’
For any kind of electric motor, not just step motors, the supply voltage is directly related to motor speed. As higher voltages are supplied to the system, the motor achieves higher speeds. The rated supply voltage specified for servo and DC motors correspond to other rated specifications including speed, torque, and power.
If a step motor is specified with a rated voltage, it is typically no more than the motor’s winding resistance times the rated current. This is useful for producing holding torque but of very little use when the step motor moves.
Like all electric motors, when the shaft starts moving, the step motor produces a back EMF (BEMF) voltage that impedes the current flowing into the windings. To produce usable torque, the supply voltage must be substantially higher than the BEMF. Because no hard and fast rules exist for how high to specify the supply voltage, users should review the published speed-torque curves for a given step motor, drive, and power supply combination.
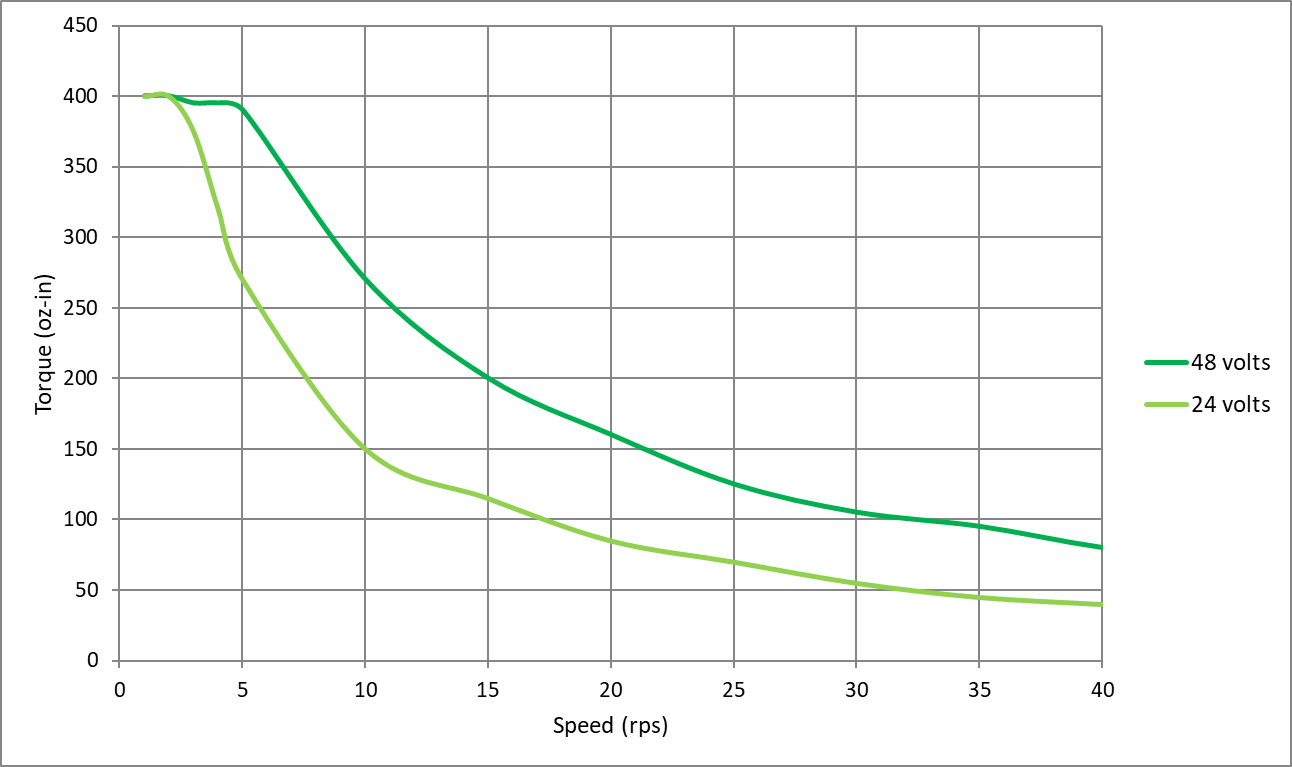
The supply voltage specified in the speed-torque curve is essential information. If ignored, say by using a 12-V supply when the published curve uses a 48-V supply, the motor won’t reach the expected torque. See Figure 2 below.
Figure 2 — two speed-torque curves of the same step motor and drive combination. Only the power supply voltage is different. The dark green line shows stall torque with a 48-V power supply. The light green line shows stall torque with a 24-V supply. A 12-V supply would spur an even lower curve.
4. ‘Can’t I run this step motor with a couple of PLC outputs? Why do a need a drive?’
Two-phase stepper drives use a set of eight transistors connected to form an H-bridge. Creating an equivalent H-bridge from PLC outputs would require eight outputs. Some two-phase step motors with six lead wires are driven with as few as four transistors. For these, you could use four PLC outputs to rotate a step motor forward and backward. However, a stepper drive does much more than simply sequence the transistors in the H-bridge.
Stepper drives regulate the current in each phase of the motor using PWM switching of the bus voltage. As noted in the previous section on voltage, the supply voltage must be high enough to overcome BEMF and produce torque at speed.
Stepper drives with microstepping capabilities further refine the PWM switching logic to ratio the current in each phase according to a sine wave, getting finer positioning than a step motor’s basic step angle. Moving beyond the most basic stepper drives, those that have trajectory generators on board can automatically ramp the motor speed up and down according to preset acceleration and deceleration rates.
Using PLC outputs to drive a step motor could be a neat project for someone interested in dissecting how step motors work. For any serious motion-control project, you’ll want a proper drive.
5. ‘The motor is so noisy … there must be something wrong with it.’
Every time a step motor takes a step, it generates a little bit of ringing noise as the rotor settles into position (think of the classic mass on a spring). The ringing is the motor’s natural resonant frequency, which is based on the motor construction. The natural resonant frequency is amplified when the frequency of motor steps approaches or equals it.
This noise is most pronounced when the step motor is driven in full step sequence (the lowest resolution available; equal to the motor’s step angle) and at low speeds, typically in the range of 1 to 5 revolutions per second.
The question of noise most often arises when a user tests a step motor for the first time with the motor unmounted and uncoupled to any load. In this scenario, the motor is free to resonate as much as it likes without anything to damp the resonance.
Fortunately, a few easy steps can mitigate the resonance:
Add mechanical damping to the system by mounting the motor and coupling the motor shaft to a load. Coupling the shaft to a load adds some amount of inertia or friction to the system … and that in turn alters or damps the motor’s natural resonant frequency.
Reduce the step angle with microstepping. When microstepping, the step angle is much smaller with each step and the natural resonant frequency is excited less.
If neither of these steps works, consider using a stepper drive with an anti-resonance algorithm built into its current control logic.
6. ‘I need an encoder to run a step motor, right?’
No, an encoder is not required to run a step motor in open-loop control. Step motors are the only type of brushless DC motor that accurately and repeatedly position a load using open-loop control. Other motors need some type of position feedback. Open-loop control works well when:
Motion tasks are the same over time.
The load doesn’t change.
The required speeds are relatively low.
Failure to complete the motion task does not result in critical or dangerous machine failure.
If the application doesn’t meet the stated criteria, consider introducing feedback into the system to permit some level of closed-loop control. Adding an encoder to a step motor system offers benefits ranging from basic functions that are essentially open-loop control but with subtle, effective improvements, to fully closed-loop control where the step motor operates as part of a servo control system. Contact your step motor and drive supplier for information on the range of feedback and closed-loop control options they offer.
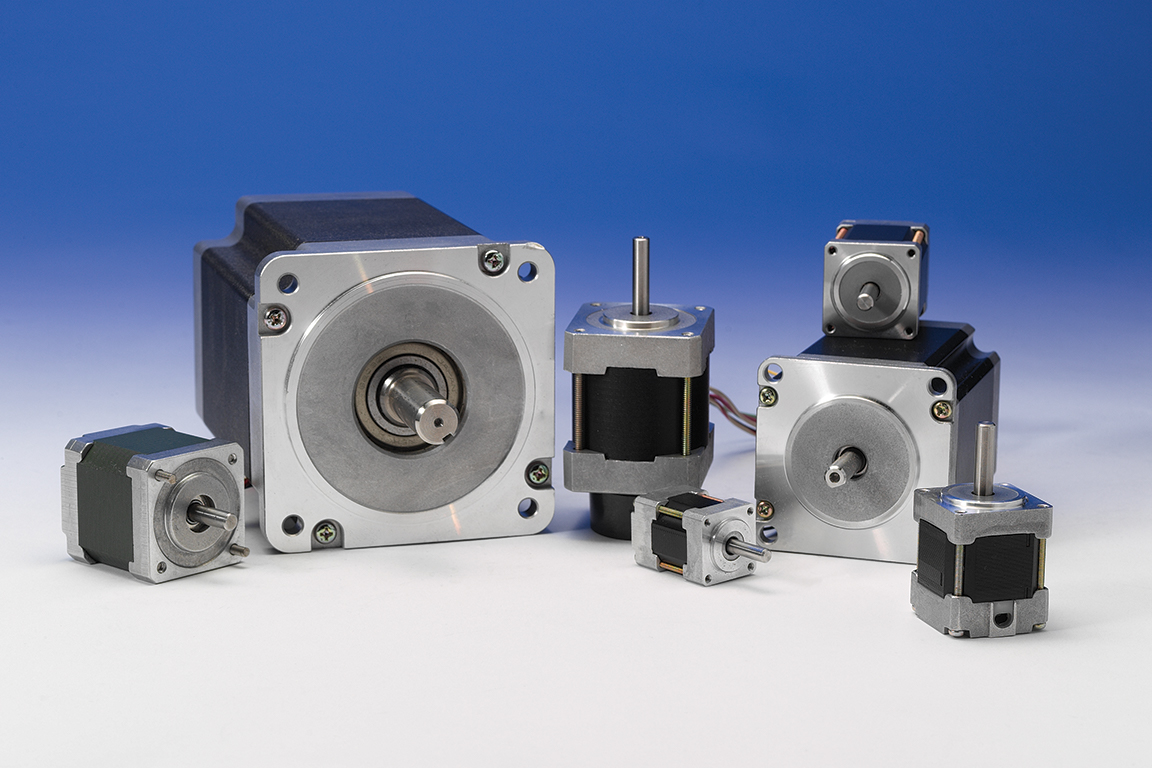
Applied Motion Products step motors come in a wide range of frame sizes — from NEMA 8 to NEMA 42 and beyond.
If the sight of a skittering bug makes you squirm, you may want to look away — a new insect-sized robot created by researchers at the University of California, Berkeley, can scurry across the floor at nearly the speed of a darting cockroach. And it’s nearly as hardy as a roach is. Try to squash this robot under your foot, and more than likely, it will just keep going.
“Most of the robots at this particular small scale are very fragile. If you step on them, you pretty much destroy the robot,” said Liwei Lin, a professor of mechanical engineering at UC Berkeley and senior author of a new study that describes the robot. “We found that if we put weight on our robot, it still more or less functions.”
Small-scale robots like these could be advantageous in search-and-rescue missions, squeezing and squishing into places where dogs or humans can’t fit, or where it may be too dangerous for them to go, said Yichuan Wu, first author of the paper, who completed the work as a graduate student in mechanical engineering at UC Berkeley through the Tsinghua-Berkeley Shenzhen Institute partnership.
“For example, if an earthquake happens, it’s very hard for the big machines, or the big dogs, to find life underneath debris, so that’s why we need a small-sized robot that is agile and robust,” said Wu, who is now an assistant professor at the University of Electronic Science and Technology of China.
The study appears this week in the journal Science Robotics.
PVDF provides roach-like characteristics
The robot, which is about the size of a large postage stamp, is made of a thin sheet of a piezoelectric material called polyvinylidene fluoride, or PVDF. Piezoelectric materials are unique, in that applying electric voltage to them causes the materials to expand or contract.
The robot is built of a layered material that bends and straightens when AC voltage is applied, causing it to spring forward in a “leapfrogging” motion. Credit: UC Berkeley video and photo by Stephen McNally
The researchers coated the PVDF in a layer of an elastic polymer, which causes the entire sheet to bend, instead of to expand or contract. They then added a front leg so that, as the material bends and straightens under an electric field, the oscillations propel the device forward in a “leapfrogging” motion.
The resulting robot may be simple to look at, but it has some remarkable abilities. It can sail along the ground at a speed of 20 body lengths per second, a rate comparable to that of a roach and reported to be the fastest pace among insect-scale robots. It can zip through tubes, climb small slopes, and carry small loads, such as a peanut.
Perhaps most impressively, the robot, which weighs less than one tenth of a gram, can withstand a weight of around 60kg [132 lb.] — about the weight of an average human — which is approximately 1 million times the weight of the robot.
“People may have experienced that, if you step on the cockroach, you may have to grind it up a little bit, otherwise the cockroach may still survive and run away,” Lin said. “Somebody stepping on our robot is applying an extraordinarily large weight, but [the robot] still works, it still functions. So, in that particular sense, it’s very similar to a cockroach.”
The robot is currently “tethered” to a thin wire that carries an electric voltage that drives the oscillations. The team is experimenting with adding a battery so the roach robot can roam independently. They are also working to add gas sensors and are improving the design of the robot so it can be steered around obstacles.
Co-authors of the paper include Justin K. Yim, Zhichun Shao, Mingjing Qi, Junwen Zhong, Zihao Luo, Ronald S. Fearing and Robert J. Full of UC Berkeley, Xiaojun Yan of Beihang University and Jiaming Liang, Min Zhang and Xiaohao Wang of Tsinghua University.
This work is supported in part by the Berkeley Sensor and Actuator Center, an Industry-University Cooperation Research Center.
Editor’s note: This article republished from the University of California, Berkeley.
The future of the robotics industry is in good hands. Meet 10-year-old Michael Wimmer, a robotics prodigy who lives just outside Charlotte, North Carolina. We caught up with Wimmer at the Robotics Summit & Expo 2019
If you don’t know Wimmer, the video above offers a chance to learn a little about him. What an impressive young man. He’s been a member of Mensa since he was four years old, and he’s going into his junior year of high school.
Not exactly what I was doing when I was 10.
Wimmer taught himself most all of his programming and robotic knowledge through trial and error and online videos. Some of his work includes building a machine learning model that could detect various toy cars. As you can see in the video below, Wimmer increased the difficulty of the challenge by testing the machine learning model only on red cars while he was wearing a red shirt. The video has been viewed nearly 170,000 times on Wimmer’s LinkedIn page, which is run by his parents.
He also developed a semi-autonomous RC Corvette using a Raspberry Pi 3 and Python coding. The car includes three modes: manual drive mode, lane keep mode and front crash avoidance mode. Wimmer said he did all the coding, from the driving and steering to sensor input and output responses. His next modification to the car will be a front camera for real-time machine learning. Check it out:
Of course, Wimmer has other hobbies besides robotics, including a passion for auto racing. For more about Wimmer, here’s a great profile by the Salisbury Post of Wimmer from November 2018. For all the robotics companies out there struggling to find employees, keep an eye on Wimmer.
The Robot Operating System is becoming the standard in robotics, not only for robotics research, but also for robotics companies that build and sell robots. In this article, I offer a list of the top 10 robotics companies worldwide that base their robotics products on ROS.
Criteria
This is the list of criteria I followed to select the winners:
We are talking about roboticscompanies that build robots. This is not about companies that produce some kind of software based in ROS, but companies that create and ship robots based in ROS. We do not consider companies that do consulting and generate solutions for a third party, either.
They have created the robots themselves. This means they are not resellers or distributors of robots made by somebody else.
They have their robots natively running ROS. This means, you switch the robot on, and it is running ROS. We are not taking into account robots that support ROS — if you install the packages. We concentrate on robots that run ROS off the shelf. For example, you can run ROS on a UR5 arm robot, but if you buy the UR5 robot, it will not come with ROS support off the shelf. You need to add an extra layer of work. We are not considering those robots.
You can program the robots. Even if some companies provide ROS-based robots — such as Locus Robotics — they do not provide a way to program them. They provide the robots as a closed solution. We are not considering closed solutions here.
To summarize the criteria: 1. You can buy the robot directly from the company; 2. The robot runs ROS from Minute 1; and 3. You can program the robot at will.
Once the companies were selected based on the previous criteria, I had to decide the order. Order was based on my personal perception of the impact those companies are making in the ROS world. That is very subjective to my own experience, I know, but that is what it is. Whenever I felt it necessary, I described my motivation behind the position of the company on the list.
Now, having clarified all that, let’s go to the list!
Clearpath is a Canadian company founded in 2009. The number of robots that it produces in the fields of unmanned ground vehicles, unmanned surface vehicles (on the water), and industrial vehicles is amazing. The company’s robots are based on ROS and can be programmed with ROS from Minute 1. That is why these robots are used in the creation of third-party applications for mining, survey, inspection, agriculture, and material handling.
Some of Clearpath’s best-known robots include Jackal UGV, which you can learn how to program. Others include the Husky UGV, Heron USV, and its recently launched series of Otto robots for industrial environments.
As a matter of trustability, this company took the responsibility to provide the customer support to the existing PR2 robots, once Willow Garage closed its doors. Because of that, and because it is the company with the most varied ROS robots available, I put it in the well-deserved No. 1 spot on this list.
Fetch Robotics was founded by Melonee Wise in 2014, after she was forced to close her previous pioneer company, Unbounded Robotics. We can say that Fetch has two lines of business. First is its line of mobile manipulators, which are mainly used for robotics research.
Then, Fetch has a line of industrial robots which it sells in fleets ready to be deployed in a warehouse to help with the transport of materials. As I understand it, the first line of business is the only one that allows direct ROS programming, and the second one is a closed product.
I did not select Fetch for No. 2 because of its research line only. I selected it for this spot because Fetch was a pioneer in the creation of affordable mobile manipulators with its Fetch robot (paired with the Freight mobile platform). Up to the moment it released Fetch, there was no ROS-based mobile manipulator on the market. (Sorry, Turtlebot 2 with a Dynamixel arm doesn’t count as a mobile manipulator.)
Recently, Fetch organized the FetchIt! challenge at ICRA 2019. (My company, The Construct, was a partner contributing to the event’s simulation.) At that event, participants had to program their Fetch to produce some pieces in a manufacturing room. You can check the results here.
Even if Fetch Robotics only produces two robots meeting the criteria above, it was the pioneer that opened the field of ROS-based mobile manipulators. That is why it deserves the No. 2 spot on this list.
Pal Robotics is based in Barcelona and was created in 2004. I especially love Pal because I worked there for more than seven years, and many of my friends are there. But love is not the reason I put them in the third position.
Pal Robotics earned No. 3 because it’s the only company in the world that builds and sells human-size humanoid robots. And not just a single type of humanoid, but three different types! The Reem robot, Reem-C robot, and recently, the TALOS robot.
Pal also produces mobile manipulators similar to the Fetch ones. They are called Tiago, and you can buy them for your research or applications on top. (If you’re interested, you can learn how to program Tiago robots with ROS in an online course that The Construct created in collaboration with Pal Robotics.)
We have recently released a simulation of TALOS, including its walking controllers. You can get it here.
Robotnik is another Spanish company, based in Castellon and founded in 2002. I call it “the Spanish Clearpath.” Really, it has built as many ROS robots as the first company on this list. Robotnik creates and designs mobile manipulators, unmanned ground vehicles of different types, and many types of mobile robots for industrial applications and logistics.
The company is also expert in personalizing your robot by integrating third-party robotics parts into a final ROS-based robot that meets your requirements.
Finally, Robotnik’s team includes the people behind the ROS Components online shop, where you can buy components for your robots that are certified to be ROS supported off the shelf. For all this extensive activity in selling ROS robots, Robotnik deserves the fourth position on this list.
A couple of months ago, Robotnik sent us one of its Summit XL robots for experimenting and creating ROS training materials. We used it extensively for our ROS Live Classes, showing how to program Robotinik robots using a cloud robotics platform.
Yujin is a Korean company specializing in vacuum cleaning robots. However, those robots are not the reason they are on this list, since they do not run ROS onboard. Instead, Yujin is here because it’s the official seller of the Kobuki robot, that is, the base system of the Turtlebot 2 robot.
The Turtlebot 2 is the most famous ROS robot in the world, even more so than the PR2! Almost every one of us has learned with that robot, either in simulation or in reality. Due to its low cost, it allows you to easily enter into the ROS world.
If you have bought a Turtlebot 2 robot, it is very likely that the base was made by Yujin. We used Kobuki as the base of our robot Barista, and I use several of them at my ROS class at La Salle University.
Additionally, Yujin has developed another ROS robot for logistics that is called GoCart, a very interesting robot for logistics inside buildings (but not warehouses). The robot can be used to send packages from one location in the building to another — including elevators on the path.
This is another Korean company that is making it big in the ROS world. Even if Robotis is well known for its Dynamixel servos, it’s best known in the ROS world because of its Turtlebot 3 robot and Open manipulator, both presented as the next generation of the Turtlebot series.
With the development of the Turtlebot 3, Robotis brought the Turtlebot concept to another level, allowing people easier entry into ROS. The manipulator is also very well integrated with the Turtlebot 3, so you can have a complete mobile manipulator for a few hundred dollars.
Even easier, the company has made all the designs of both robots open-source, so you can build the robots yourself. Here are the designs of Turtlebot 3. Here are the designs of Open Manipulator.
Shadow Robot is based in London. This company is a pioneer in the development of humanoid robotic hands. To my knowledge, Shadow Robot is the only company in the world that sells that kind of robotic hand.
Furthermore, its hands are ROS-programmable off the shelf. Apart from hands, Shadow Robot also produces many other types of grippers, which can be mounted on robotic arms to create complete grasping solutions.
Husarion is a Polish company founded in 2013. It sells simple and compact autonomous mobile robots called ROSbots. They are small, four-wheeled robots equipped with a lidar, camera, and a point cloud device. These robots are perfect for learning ROS with a real robot, or for doing research and learning with a more compact robot than the Turtlebot 2.
Husarion also produces the Panther robot, which is more oriented to outdoor environments, but with the same purpose of research and learning.
What makes Husarion different from other companies selling ROS robots is the compactness of its robots and its creation of the Husarnet network, which connects the robots through the cloud and has remote control over them.
Neobotix is a manufacturer of mobile robots and robot systems in general. It provides robots and manipulators for a wide range of industrial applications, especially in the sector of transporting material.
Neobotix is a spin-off of the Fraunhofer Institute in Stuttgart, and it created the famous Care-O-Bot, used many times in the Robocup@Home competitions. However, as far as I know, the Care-O-Bot never reached the point of product, even if you can order five of them and get them delivered, running immediately after unpacking.
At present, Neobotix is focusing on selling mobile bases, which can be customized with robotics arms, converting the whole system in a custom mobile manipulator.
The company also sells the mobile bases and the manipulators separately. Examples of mobile bases include Neobotix’s MP series of robots. On the mobile manipulator side, it sells the MM series. All of them work off-the-shelf with ROS.
Even if Neobotix’s products are full products on their own, I see them more as components that we can use for building more complex robots, allowing us to save time creating all the parts. That is why I have decided to put it in the ninth position and not above the other products.
Gaitech is a Chinese company that is mainly dedicated to distributing ROS robots, and ROS products in general, in China. from third-party companies. They include many of the companies on this list, including Fetch, Pal, and Robotnik.
However, Gaitech has also developed its own line of robots. For example, the Gapter drone is the only drone I’m aware of that works with ROS off the shelf.
Even if Gaitech’s robots are not very popular in the ROS circuit, I have included them it because at present, it’s the only company in the world that is building ROS–based drones. (Erle Robotics did ROS-based drones in the past, but as far as I know, that ceased when it switched to Acutronic Robotics.) Due to this lack of competition, I think Gaitech deserves the No. 10 position.
The following is a shortlist of other companies building ROS robots that did not make it onto the list for certain reasons. They may be here next year!
1. Sony
Sony is a complete newcomer to the world of ROS robots, but it has entered through the big door. Last year, it announced the release of the Aibo robot dog, which fully works on ROS. That was a big surprise to all of us, especially since Sony abandoned the Aibo project back in 2005.
Sony’s revived robot dog could have put it on the list above, except for the fact that the robot is still too new and can only be bought in the U.S. and Japan. Furthermore, the robot still has a very limited programming SDK, so you can barely program it.
If you are interested in the inner workings of Aibo with ROS, have a look at the presentation by Tomoya Fujita, one of the engineers of the project, during the ROS Developers Conference 2019, where he explained the communication mechanism between processes that they had to develop for ROS in order to reduce battery consumption in Aibo. Amazing stuff, fully compatible with ROS nodes and using the standard communication protocol!
This is a company based on selling simple mobile bases based on ROS for the development of third-party solutions, or as it calls them, “robot applications.” Ubiquity Robotics’ goal is to provide a solid mobile base with off-the-shelf navigation on top of which you can build other solutions like telepresence, robotic waiters, and so on.
Ubiquity Robotics is a young company with a good idea in mind, but it’s very close to existing solutions like Neobotix or Robotnik. Let’s see next year how they have evolved.
This company started building ROS-based drones, but recently, they changed direction to produce hardware ROS microchips. Acutronic produces the MARA robot, an industrial arm based on ROS2 on the H-ROS microchips.
However, as far as I know, the MARA robot is not Acutronics’ main business, since the company created it and sells it as an example of what can be done with H-ROS. That is why I decided not to include this company in the main top 10 list.
By the way, we also collaborated with Acutronic to create a series of videos about how to learn ROS2 using their MARA robot.
Most of the ROS-based robotics companies are based on wheeled robots. A few exceptions are the humanoid robots of Pal Robotics, the drones of Gaitech, the robotic hands from Shadow Robots, and the robot arms from Neobotix.
It’s very interesting that we see almost no drones and no robotic arms running ROS off the shelf, since both of them are very basic types of robots. There are many robotic arm companies that provide ROS drivers for their robots and many packages for their control, like Universal Robots or Kinova.
But of the listed companies, only Neobotix actually provides an off-the-shelf arm robot with its MM series. I think there is a lot of market space for new ROS-based drones and robotic arms. Take note of that, entrepreneurs of the world!
Finally, I would like to acknowledge that I do not know all the ROS companies out there. Even if I have done my research to create this article, I may have missed some companies worth mentioning. Let me know if you know of or have a company that sells ROS robots and should be on this list, so I can update it and correct any mistakes.
About the author
Ricardo Tellez is co-founder and CEO of The Construct. Prior to this role, he was a postdoctoral researcher at the Robotics Institute of the Spanish Research Council. Tellez worked for more than seven years at Pal Robotics developing humanoid robots, including its navigation system and reasoning engine. He holds a Ph.D. in artificial intelligence and aims to create robots that really understand what they are doing. Tellez spoke at the 2019 Robotics Summit & Expo in Boston.
RobotUnion, which claims to be the first pan-European acceleration program fully focused on robotics, announced the winners of its second open call for robotics startups. The winners of up to €223,000 ($250,000 U.S.) in equity-free funding each were announced earlier this month.
The jury consisted of investors such as Fundingbox and Chrysalix Venture Capital, as well as technical experts from institutes such as the VTT Technical Research Centre of Finland, the Danish Technological Institute, and TU Delft (from the Netherlands).
In addition to the funding, mentors from Google, Airbnb, Ikea, Yahoo, Microsoft and other companies will be made available. Ten startups will gain access to technical support from European robotics experts and business-acceleration services.
The robotics startups selected by RobotUnion are now participating in a 14-month acceleration process. In the initial two-month feasibility phase, the startups must define a plan specifying the technical and market potential of their robotics systems. They will present these plans at a Welcome Camp in Odense, Denmark, on Oct. 2 and 3, 2019.
Below, in alphabetical order, are 15 of the European robotics startups selected by RobotUnion. Several startups were excluded from this recap, including additive manufacturing companies and manufacturing companies that use robots, as they don’t fit The Robot Report‘s definition of a robotics company. Check out the full list here.
Aether Biomedical, a Poland-based startup founded in 2016, is developing Zeus is a low-cost, high-efficacy prosthesis. This bionic limb has 14 grip modes, five individually motorized articulating digits, closed loop motor control to sense finger position and applied force for proportional control and much more. Zeus uses EMG electrodes for advanced signal processing and to provide wireless gain adjustment. The sensitivity and smoothness of the signal can also be manipulated.
Automato Robotics
Founded in 2018, Tel Aviv, Israel-based Automato Robotics is developing a robot for harvesting fresh tomatoes, primarily in passive greenhouses. The company says its “focus is on single (not vine) tomatoes, grown in soil greenhouses/high-tunnels. The robot, which you can watch in the video above, can currently carry 90kg directly on the robot or tow much heavier loads.
Axiles Bionics
Belgium-based Axiles Bionics is developing the AMP-Foot, a prosthetic ankle-foot prosthesis. The company says the prosthesis is capable of bringing back a natural gait and posture during daily life activities, being flexible and highly responsive to the person’s intention and to the environment.
Cyber Surgery
Cyber Surgery develops a robotic system for spinal procedures. Founded in 2017, Cyber Surgery is a spin-off from the industrial group Egile and has its headquarters in San Sebastian (Spain).
Formhand
Formhand is a German company founded in 2018 that makes granulate-based vacuum grippers that can adapt to and handle objects with different shapes. The Formhand grippers feature a modular design that the company says makes it easy to scale the technology.
IM Systems
IM Systems (IMS), which spoke at the Robotics Summit & Expo 2019 (produced by The Robot Report), is developing the Archimedes drive, a planetary transmission that uses friction instead of gear teeth to transmit torque. Founded in 2016 in Delft, The Netherlands, IMS won Automate’s Launch Pad Startup Competition.
Invented by IMS founder and CEO Jack Schorsch, the company claims the Archimedes Drive offers low-input friction, minimal backlash and ratios of 10,000:1. IMS is targeting the drive at robotics companies, but it could have other applications.
IntSite
Israeli startup IntSite, founded in 2017 by brothers Tzach and Mor Ram-On, is developing autonomous cranes. The company’s computer vision technology analyzes camera feeds in real time for obstacles avoidance. And its automated controls improve the cranes’ precision by as much as 30 percent.
IntSite raised a $1.35 million pre-seed round in September 2018 that was led by Terra Venture Partners and the Israel Innovation Authority.
Kinfinity
German startup Kinfinity is developing the Kinfinity Glove, a new generation of multi-modal input device for use in various applications, including robotics. In the video above from the 2018 World Robot Conference, you see the Kinfinity Glove being used to control a robotic arm.
Life Science Robotics
Danish robotics startup Life Science Robotics is building ROBERT, a rehabilitation robot focusing on active resistive and assistive mobilization of the lower extremities. The idea is to use a KUKA LBR iiwa collaborative robot arm to release healthcare workers of heavy and continuous lifting, which can cause physical strain and pain in the back, loin, wrists and shoulders.
ROBERT is also beneficial to the patients, the company says, because it can prevent soft tissue contracture and pressure sores, minimize risk of blood clots and pneumonia and reduce muscular atrophy and neuropathic effects.
LuxAI
Luxembourg-based LuxAI is developing the QTrobot, which is a proactive social robot designed to assist autism professionals in helping children with autism spectrum disorder to learn new social, emotional and communicational skills. There is a version of the QTrobot for researchers, too. The company says a home edition of QTrobot will be available for the parents soon.
Proxima Centauri
Denmark-based Proxima Centauri is automating the picking and sorting of sausage casings. The company says sausage casings need to be sorted according to their diameter to produce consistent sausages. Manual sorting is an expensive process, which resulted in the casings being shipped to low-wage countries to reduce labor costs. Automating this process, the company says, will reduce processing time and improve the traceability and quality of the product.
Rigitech
Rigitech is a Swiss startup offering improved logistics through cargo drone delivery. Its drones combine vertical takeoff and landing technology with fixed wing range capabilities. The drones can carry up to 3kg, which it says represents more than 80% of parcels shipped today, with a 4km flight range on one battery. Rigitech says its applications include e-commerce, healthcare, humanitarian efforts and more.
Robotical
UK-based Robotical is the maker of Marty the Robot, which is designed to teach kids how to code. Marty comes as a kit or pre-built. Marty is Wi-Fi enabled and has 9 individually controllable servo motors. You can use an app to remote control Marty and add a bunch of sensors to react to the environment. Marty can be programmed using Scratch, Python, Javascript and ROS.
Rovenso
Founded in 2016, Swiss company Rovenso makes an autonomous mobile robot called ROVéo for security applications. Combining 3D laser scanning, night vision, thermal vision and acoustic analysis, ROVéo uses multi-modal sensor fusion to detects the slightest anomalies. And based on patented technology, ROVéo can tackle rough terrain and climb stairs by adapting to their shape.
Scaled Robotics
Spain-based Scaled Robotics builds mobile robots that navigate construction sites to collect 3D maps. These maps are uploaded to the cloud to track the progress of a job and the quality of the construction to find potential mistakes.