Years ago, MIT Professor Neil Gershenfeld had an audacious thought. Struck by the fact that all the world’s living things are built out of combinations of just 20 amino acids, he wondered: Might it be possible to create a kit of just 20 fundamental parts that could be used to assemble all of the different technological products in the world?
Gershenfeld and his students have been making steady progress in that direction ever since. Their latest achievement, presented this week at an international robotics conference, consists of a set of five tiny fundamental parts that can be assembled into a wide variety of functional devices, including a tiny “walking” motor that can move back and forth across a surface or turn the gears of a machine.
Previously, Gershenfeld and his students showed that structures assembled from many small, identical subunits can have numerous mechanical properties. Next, they demonstrated that a combination of rigid and flexible part types can be used to create morphing airplane wings, a longstanding goal in aerospace engineering. Their latest work adds components for movement and logic, and will be presented at the International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS) in Helsinki, Finland, in a paper by Gershenfeld and MIT graduate student Will Langford.
New approach to building robots
Their work offers an alternative to today’s approaches to constructing robots, which largely fall into one of two types: custom machines that work well but are relatively expensive and inflexible, and reconfigurable ones that sacrifice performance for versatility. In the new approach, Langford came up with a set of five millimeter-scale components, all of which can be attached to each other by a standard connector. These parts include the previous rigid and flexible types, along with electromagnetic parts, a coil, and a magnet. In the future, the team plans to make these out of still smaller basic part types.
Using this simple kit of tiny parts, Langford assembled them into a novel kind of motor that moves an appendage in discrete mechanical steps, which can be used to turn a gear wheel, and a mobile form of the motor that turns those steps into locomotion, allowing it to “walk” across a surface in a way that is reminiscent of the molecular motors that move muscles. These parts could also be assembled into hands for gripping, or legs for walking, as needed for a particular task, and then later reassembled as those needs change. Gershenfeld refers to them as “digital materials,” discrete parts that can be reversibly joined, forming a kind of functional micro-LEGO.
The new system is a significant step toward creating a standardized kit of parts that could be used to assemble robots with specific capabilities adapted to a particular task or set of tasks. Such purpose-built robots could then be disassembled and reassembled as needed in a variety of forms, without the need to design and manufacture new robots from scratch for each application.
Robots working in confined spaces
Langford’s initial motor has an ant-like ability to lift seven times its own weight. But if greater forces are required, many of these parts can be added to provide more oomph. Or if the robot needs to move in more complex ways, these parts could be distributed throughout the structure. The size of the building blocks can be chosen to match their application; the team has made nanometer-sized parts to make nanorobots, and meter-sized parts to make megarobots. Previously, specialized techniques were needed at each of these length scale extremes.
“One emerging application is to make tiny robots that can work in confined spaces,” Gershenfeld says. Some of the devices assembled in this project, for example, are smaller than a penny yet can carry out useful tasks.
To build in the “brains,” Langford has added part types that contain millimeter-sized integrated circuits, along with a few other part types to take care of connecting electrical signals in three dimensions.
The simplicity and regularity of these structures makes it relatively easy for their assembly to be automated. To do that, Langford has developed a novel machine that’s like a cross between a 3-D printer and the pick-and-place machines that manufacture electronic circuits, but unlike either of those, this one can produce complete robotic systems directly from digital designs. Gershenfeld says this machine is a first step toward to the project’s ultimate goal of “making an assembler that can assemble itself out of the parts that it’s assembling.”
Editor’s Note: This article was republished from MIT News.
Researchers at the Delft University of Technology in the Netherlands have developed highly programmable soft actuators that, similar to the human hand, combine soft and hard materials to perform complex movements. These materials have great potential for soft robots that can safely and effectively interact with humans and other delicate objects, said the TU Delft scientists.
“Robots are usually big and heavy. But you also want robots that can act delicately, for instance, when handling soft tissue inside the human body. The field that studies this issue, soft robotics, is now really taking off,” said Prof. Amir Zadpoor, who supervised the research presented the July 8 issue of Materials Horizons.
“What you really want is something resembling the features of the human hand including soft touch, quick yet accurate movements, and power,” he said. “And that’s what our soft 3D-printed programmable materials strive to achieve.”
Tunability
Owing to their soft touch, soft robotics can safely and effectively interact with humans and other delicate objects. Soft programmable mechanisms are required to power this new generation of robots. Flexible mechanical metamaterials, working on the basis of mechanical instability, offer unprecedented functionalities programmed into their architected fabric that make them potentially very promising as soft mechanisms, said the TU Delft researchers.
“However, the tunability of the mechanical metamaterials proposed so far have been very limited,” said first author Shahram Janbaz.
Programmable soft actuators
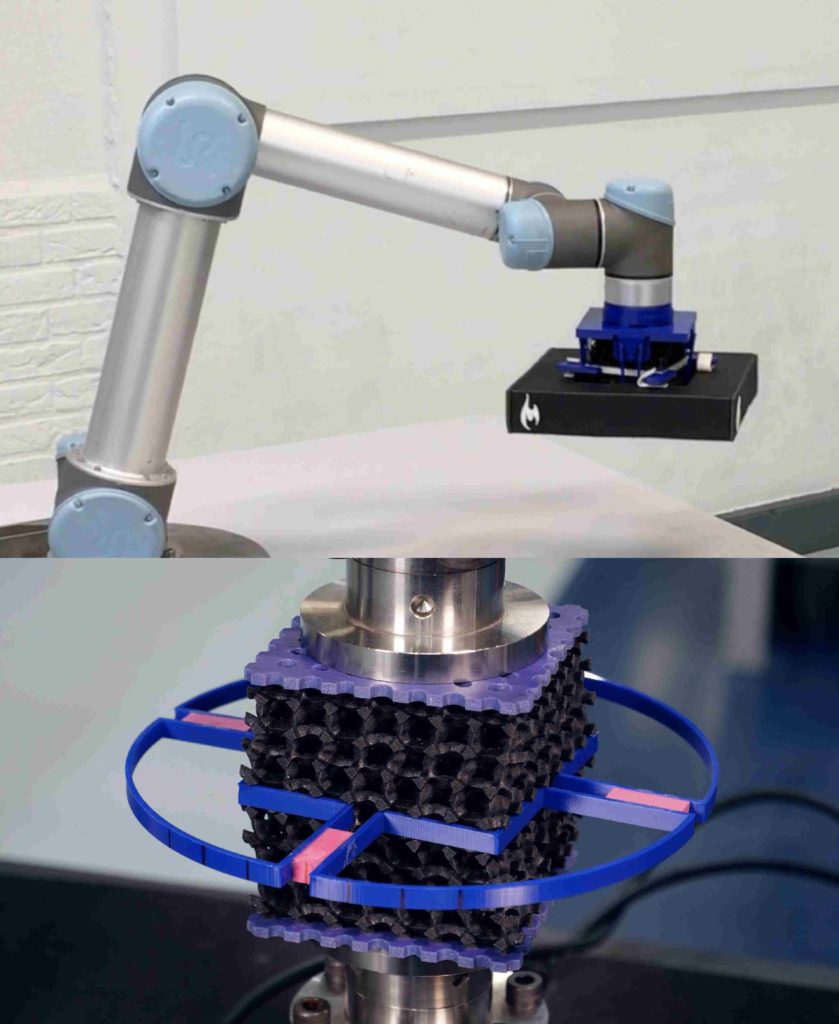
“We now present some new designs of ultra-programmable mechanical metamaterials, where not only the actuation force and amplitude, but also the actuation mode could be selected and tuned within a very wide range,” explained Janbaz. “We also demonstrate some examples of how these soft actuators could be used in robotics, for instance as a force switch, kinematic controllers, and a pick-and-place end-effector.”
A conventional robotic arm is modified using the developed soft actuators to provide soft touch during pick-and-place tasks. Source: TU Delft
Buckling
“The function is already incorporated in the material,” Zadpoor explained. “Therefore, we had to look deeper at the phenomenon of buckling. This was once considered the epitome of design failure, but has been harnessed during the last few years to develop mechanical metamaterials with advanced functionalities.”
“Soft robotics in general and soft actuators in particular could greatly benefit from such designer materials,” he added. “Unlocking the great potential of buckling-driven materials is, however, contingent on resolving the main limitation of the designs presented to date, namely the limited range of their programmability. We were able to calculate and predict higher modes of buckling and make the material predisposed to these higher modes.”
3D printing
“So, we present multi-material buckling-driven metamaterials with high levels of programmability,” said Janbaz. “We combined rational design approaches based on predictive computational models with advanced multi-material additive manufacturing techniques to 3D print cellular materials with arbitrary distributions of soft and hard materials in the central and corner parts of their unit cells.”
“Using the geometry and spatial distribution of material properties as the main design parameters, we developed soft mechanical metamaterials behaving as mechanisms whose actuation force and actuation amplitude could be adjusted,” he said.
Editor’s note: This article republished from TU Delft.
Wouldn’t it be amazing to have a robot in your home that could work with you to put away the groceries, fold the laundry, cook your dinner, do the dishes, and tidy up before the guests come over? For some of us, a robot assistant – a teammate – might only be a convenience.
But for others, including our growing population of older people, applications like this could be the difference between living at home or in an assisted care facility. Done right, we believe these robots will amplify and augment human capabilities, allowing us to enjoy longer, healthier lives.
Decades of prognostications about the future – largely driven by science fiction novels and popular entertainment – have encouraged public expectations that someday home robots will happen. Companies have been trying for years to deliver on such forecasts and figure out how to safely introduce ever more capable robots into the unstructured home environment.
Despite this age of tremendous technological progress, the robots we see in homes to date are primarily vacuum cleaners and toys. Most people don’t realize how far today’s best robots are from being able to do basic household tasks. When they see heavy use of robot arms in factories or impressive videos on YouTube showing what a robot can do, they might reasonably expect these robots could be used in the home now.
Bringing robots into the home
Why haven’t home robots materialized as quickly as some have come to expect? One big challenge is reliability. Consider:
If you had a robot that could load dishes into the dishwasher for you, what if it broke a dish once a week?
Or, what if your child brings home a “No. 1 DAD!” mug that she painted at the local art studio, and after dinner, the robot discards that mug into the trash because it didn’t recognize it as an actual mug?
A major barrier for bringing robots into the home are core unsolved problems in manipulation that prevent reliability. As I presented this week at the Robotics: Science and Systems conference, the Toyota Research Institute (TRI) is working on fundamental issues in robot manipulation to tackle these unsolved reliability challenges. We have been pursuing a unique combination of robotics capabilities focused on dexterous tasks in an unstructured environment.
Unlike the sterile, controlled and programmable environment of the factory, the home is a “wild west” – unstructured and diverse. We cannot expect lab tests to account for every different object that a robot will see in your home. This challenge is sometimes referred to as “open-world manipulation,” as a callout to “open-world” computer games.
Despite recent strides in artificial intelligence and machine learning, it is still very hard to engineer a system that can deal with the complexity of a home environment and guarantee that it will (almost) always work correctly.
TRI addresses the reliability gap
Above is a demonstration video showing how TRI is exploring the challenge of robustness that addresses the reliability gap. We are using a robot loading dishes in a dishwasher as an example task. Our goal is not to design a robot that loads the dishwasher, but rather we use this task as a means to develop the tools and algorithms that can in turn be applied in many different applications.
Our focus is not on hardware, which is why we are using a factory robot arm in this demonstration rather than designing one that would be more appropriate for the home kitchen.
The robot in our demonstration uses stereo cameras mounted around the sink and deep learning algorithms to perceive objects in the sink. There are many robots out there today that can pick up almost any object — random object clutter clearing has become a standard benchmark robotics challenge. In clutter clearing, the robot doesn’t require much understanding about an object — perceiving the basic geometry is enough.
For example, the algorithm doesn’t need to recognize if the object is a plush toy, a toothbrush, or a coffee mug. Given this, these systems are also relatively limited with what they can do with those objects; for the most part, they can only pick up the objects and drop them in another location only. In the robotics world, we sometimes refer to these robots as “pick and drop.”
Loading the dishwasher is actually significantly harder than what most roboticists are currently demonstrating, and it requires considerably more understanding about the objects. Not only does the robot have to recognize a mug or a plate or “clutter,” but it has to also understand the shape, position, and orientation of each object in order to place it accurately in the dishwasher.
TRI’s work in progress shows not only that this is possible, but that it can be done with robustness that allows the robot to continuously operate for hours without disruption.
Getting a grasp on household tasks
Our manipulation robot has a relatively simple hand — a two-fingered gripper. The hand can make relatively simple grasps on a mug, but its ability to pick up a plate is more subtle. Plates are large and may be stacked, so we have to execute a complex “contact-rich” maneuver that slides one gripper finger under and between plates in order to get a firm hold. This is a simple example of the type of dexterity that humans achieve easily, but that we rarely see in robust robotics applications.
Silverware can also be tricky — it is small and shiny, which makes it hard to see with a machine-learning camera. Plus, given that the robot hand is relatively large compared to the smaller sink, the robot occasionally needs to stop and nudge the silverware to the center of the sink in order to do the pick. Our system can also detect if an object is not a mug, plate or silverware and, labeling it as “clutter,” and move it to a “discard” bin.
Connecting all of these pieces is a sophisticated task planner, which is constantly deciding what task the robot should execute next. This task planner decides if it should pull out the bottom drawer of the dishwasher to load some plates, pull out the middle drawer for mugs, or pull out the top drawer for silverware.’
Like the other components, we have made it resilient — if the drawer gets suddenly closed when it was needed to be open, the robot will stop, put down the object on the counter top, and pull the drawer back out to try again. This response shows how different this capability is than a typical precision, repetitive factory robot, which are typically isolated from human contact and environmental randomness.
The cornerstone of TRI’s approach is the use of simulation. Simulation gives us a principled way to engineer and test systems of this complexity with incredible task diversity and machine learning and artificial intelligence components. It allows us to understand what level of performance the robot will have in your home with your mugs, even though we haven’t been able to test in yourkitchen during our development.
An exciting achievement is that we have made great strides in making simulation robust enough to handle the visual and mechanical complexity of this dishwasher loading task and on closing the “sim to real” gap. We are now able to design and test in simulation and have confidence that the results will transfer to the real robot. At long last, we have reached a point where we do nearly all of our development in simulation, which has traditionally not been the case for robotic manipulation research.
We can run many more tests in simulation and more diverse tests. We are constantly generating random scenarios that will test the individual components of the dish loading plus the end-to-end performance.
Let me give you a simple example of how this works. Consider the task of extracting a single mug from the sink. We generate scenarios where we place the mug in all sorts of random configurations, testing to find “corner cases” — rare situations where our perception algorithms or grasping algorithms might fail. We can vary material properties and lighting conditions. We even have algorithms for generating random, but reasonable, shapes of the mug, generating everything from a small espresso cup to a portly cylindrical coffee mug.
We conduct simulation testing through the night, and every morning we receive a report that gives us new failure cases that we need to address.
Early on, those failures were relatively easy to find, and easy to fix. Sometimes they are failures of the simulator — something happened in the simulator that could never have happened in the real world — and sometimes they are problems in our perception or grasping algorithms. We have to fix all of these failures.
TRI is using an industrial robot for household tasks to test its algorithms. Source: TRI
As we continue down this road to robustness, the failures are getting more rare and more subtle. The algorithms that we use to find those failures also need to get more advanced. The search space is so huge, and the performance of the system so nuanced, that finding the corner cases efficiently becomes our core research challenge.
Although we are exploring this problem in the kitchen sink, the core ideas and algorithms are motivated by, and are applicable to, related problems such as verifying automated driving technologies.
‘Repairing’ algorithms
The next piece of our work focuses on the development of algorithms to automatically “repair” the perception algorithm or controller whenever we find a new failure case. Because we are using simulation, we can test our changes against not only this newly discovered scenario, but also make sure that our changes also work for all of the other scenarios that we’ve discovered in the preceding tests.
Of course, it’s not enough to fix this one test. We have to make sure we also do not break all of the other tests that passed before. It’s possible to imagine a not-so-distant future where this repair can happen directly in your kitchen, whereby if one robot fails to handle your mug correctly, then all robots around the world learn from that mistake.
We are committed to achieving dexterity and reliability in open-world manipulation. Loading a dishwasher is just one example in a series of experiments we will be using at TRI to focus on this problem.
It’s a long journey, but ultimately it will produce capabilities that will bring more advanced robots into the home. When this happens, we hope that older adults will have the help they need to age in place with dignity, working with a robotic helper that will amplify their capabilities, while allowing more independence, longer.
Editor’s note: This post by Dr. Russ Tedrake, vice president of robotics research at TRI and a professor at the Massachusetts Institute of Technology, is republished with permission from the Toyota Research Institute.
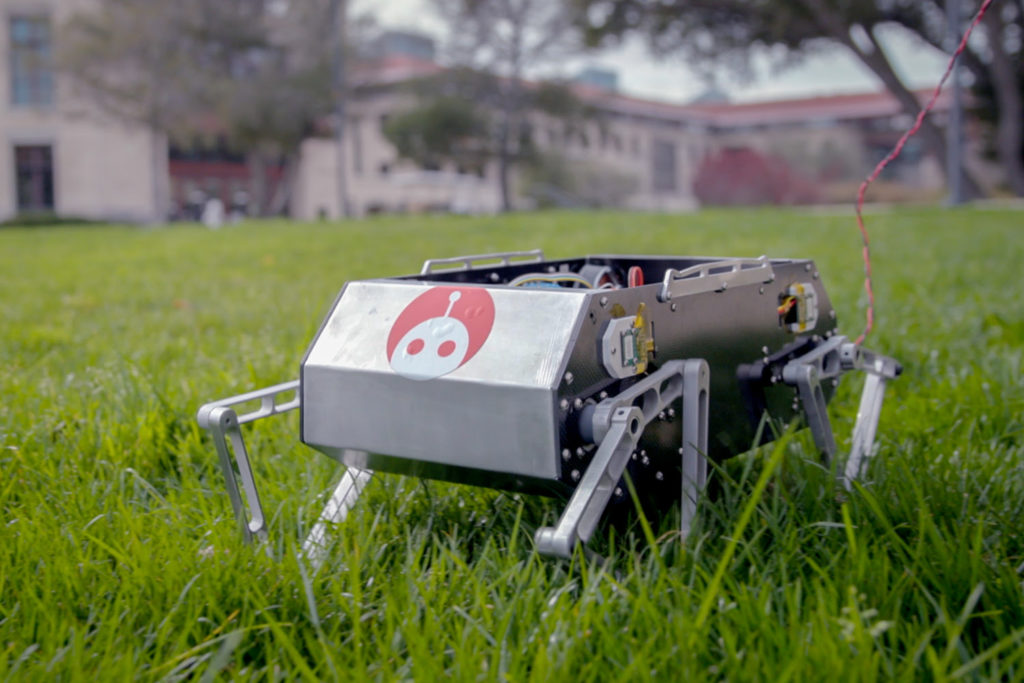
Putting their own twist on robots that amble through complicated landscapes, the Stanford Student Robotics club’s Extreme Mobility team at Stanford University has developed a four-legged robot that is not only capable of performing acrobatic tricks and traversing challenging terrain, but is also designed with reproducibility in mind. Anyone who wants their own version of the robot, dubbed Stanford Doggo, can consult comprehensive plans, code and a supply list that the students have made freely available online.
“We had seen these other quadruped robots used in research, but they weren’t something that you could bring into your own lab and use for your own projects,” said Nathan Kau, ’20, a mechanical engineering major and lead for Extreme Mobility. “We wanted Stanford Doggo to be this open source robot that you could build yourself on a relatively small budget.”
Whereas other similar robots can cost tens or hundreds of thousands of dollars and require customized parts, the Extreme Mobility students estimate the cost of Stanford Doggo at less than $3,000 — including manufacturing and shipping costs. Nearly all the components can be bought as-is online. The Stanford students said they hope the accessibility of these resources inspires a community of Stanford Doggo makers and researchers who develop innovative and meaningful spinoffs from their work.
Stanford Doggo can already walk, trot, dance, hop, jump, and perform the occasional backflip. The students are working on a larger version of their creation — which is currently about the size of a beagle — but they will take a short break to present Stanford Doggo at the International Conference on Robotics and Automation (ICRA) on May 21 in Montreal.
In order to make Stanford Doggo replicable, the students built it from scratch. This meant spending a lot of time researching easily attainable supplies and testing each part as they made it, without relying on simulations.
“It’s been about two years since we first had the idea to make a quadruped. We’ve definitely made several prototypes before we actually started working on this iteration of the dog,” said Natalie Ferrante, Class of 2019, a mechanical engineering co-terminal student and Extreme Mobility Team member. “It was very exciting the first time we got him to walk.”
Stanford Doggo’s first steps were admittedly toddling, but now the robot can maintain a consistent gait and desired trajectory, even as it encounters different terrains. It does this with the help of motors that sense external forces on the robot and determine how much force and torque each leg should apply in response. These motors recompute at 8,000 times a second and are essential to the robot’s signature dance: a bouncy boogie that hides the fact that it has no springs.
Instead, the motors act like a system of virtual springs, smoothly but perkily rebounding the robot into proper form whenever they sense it’s out of position.
Among the skills and tricks the team added to the robot’s repertoire, the students were exceptionally surprised at its jumping prowess. Running Stanford Doggo through its paces one (very) early morning in the lab, the team realized it was effortlessly popping up 2 feet in the air. By pushing the limits of the robot’s software, Stanford Doggo was able to jump 3, then 3½ feet off the ground.
“This was when we realized that the robot was, in some respects, higher performing than other quadruped robots used in research, even though it was really low cost,” recalled Kau.
Since then, the students have taught Stanford Doggo to do a backflip – but always on padding to allow for rapid trial and error experimentation.
Stanford students have developed Doggo, a relatively low-cost four-legged robot that can trot, jump and flip. (Image credit: Kurt Hickman)
What will Stanford Doggo do next?
If these students have it their way, the future of Stanford Doggo in the hands of the masses.
“We’re hoping to provide a baseline system that anyone could build,” said Patrick Slade, graduate student in aeronautics and astronautics and mentor for Extreme Mobility. “Say, for example, you wanted to work on search and rescue; you could outfit it with sensors and write code on top of ours that would let it climb rock piles or excavate through caves. Or maybe it’s picking up stuff with an arm or carrying a package.”
That’s not to say they aren’t continuing their own work. Extreme Mobility is collaborating with the Robotic Exploration Lab of Zachary Manchester, assistant professor of aeronautics and astronautics at Stanford, to test new control systems on a second Stanford Doggo. The team has also finished constructing a robot twice the size of Stanford Doggo that can carry about 6 kilograms of equipment. Its name is Stanford Woofer.

 Keynotes
Keynotes