PneuConnect with GRT gripper on a UR cobot. Source: PHD
PHD Inc. this month added three products to its line of grippers and accessories for industrial automation. They are intended to help robots grip large objects, make positioning and programming easy for maximum efficiency, and facilitate machine tending. PHD’s products are designed to work with collaborative robot arms, or cobots, from Universal Robots A/S.
Fort Wayne, In.-based PHD said it sells grippers, linear slides, and the widest range of long-life, robust actuators in the industry. It also offers engineering software and Internet-based tools to save design time, support from factory-trained application and industry specialists, and rapid product delivery.
PHD adds jaw-travel option to GRR line
The company has added a 300mm (11.81 in.) jaw-travel model of its Series GRR high-capacity pneumatic grippers. These parallel grippers are designed to provide high grip force, five long-jaw travels, and high loads.
Because the Guardian grippers can withstand high impact and shock loads, they are suitable for applications such as small engine block manufacturing, automotive wheel-rim manufacturing, and foundry applications, said PHD.
Also available is the Series EGRR high-capacity electric parallel grippers, which offer many of the same benefits as the pneumatic design.
Pneu-Connect X2 with dual grippers available
PHD also announced the release of Pneu-Connext X2 kits with dual grippers. They can be mounted to UR cobots for maximum efficiency in automation performance.
The Pneu-Connect X2 includes PHD’s Freedrive feature, which interfaces with UR cobots for easy positioning and programming. The kits come in the following standard combinations:
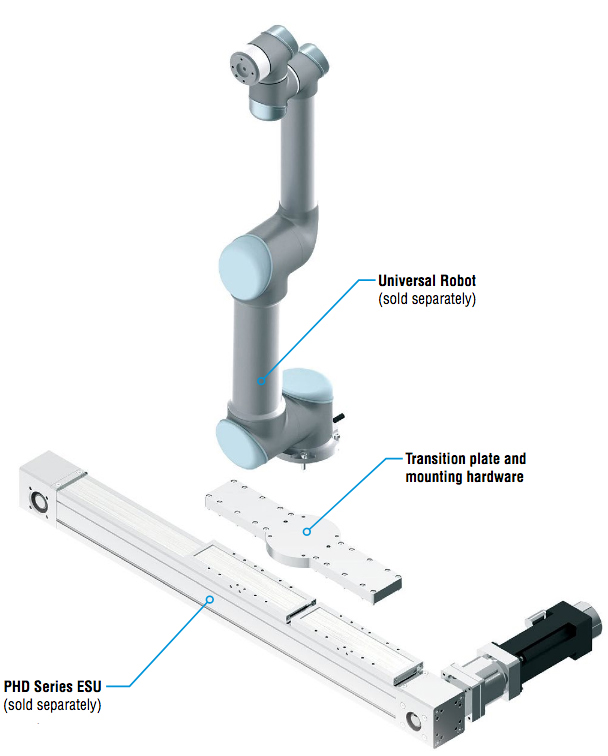
Transition plates connect UR directly to linear actuator
PHD’s transition plate allows a Universal Robot arm to be directly attached to the new PHD Series ESU electric belt-driven linear actuator. The company said it offers a transition plate for each size of UR arm, “taking machine tending to a whole new level.”
This transition plate provides a seventh axis for UR arms with the ESU linear actuator. Source: PHD
With a cataloged stroke of up to 5500mm (216.53 in.), users can increase the working area of a UR10 arm by 10 times.
Keven Walgamott had a good “feeling” about picking up the egg without crushing it. What seems simple for nearly everyone else can be more of a Herculean task for Walgamott, who lost his left hand and part of his arm in an electrical accident 17 years ago. But he was testing out the prototype of LUKE, a high-tech prosthetic arm with fingers that not only can move, they can move with his thoughts. And thanks to a biomedical engineering team at the University of Utah, he “felt” the egg well enough so his brain could tell the prosthetic hand not to squeeze too hard.
That’s because the team, led by University of Utah biomedical engineering associate professor Gregory Clark, has developed a way for the “LUKE Arm” (named after the robotic hand that Luke Skywalker got in The Empire Strikes Back) to mimic the way a human hand feels objects by sending the appropriate signals to the brain.
Their findings were published in a new paper co-authored by University of Utah biomedical engineering doctoral student Jacob George, former doctoral student David Kluger, Clark, and other colleagues in the latest edition of the journal Science Robotics.
Sending the right messages
“We changed the way we are sending that information to the brain so that it matches the human body. And by matching the human body, we were able to see improved benefits,” George says. “We’re making more biologically realistic signals.”
That means an amputee wearing the prosthetic arm can sense the touch of something soft or hard, understand better how to pick it up, and perform delicate tasks that would otherwise be impossible with a standard prosthetic with metal hooks or claws for hands.
“It almost put me to tears,” Walgamott says about using the LUKE Arm for the first time during clinical tests in 2017. “It was really amazing. I never thought I would be able to feel in that hand again.”
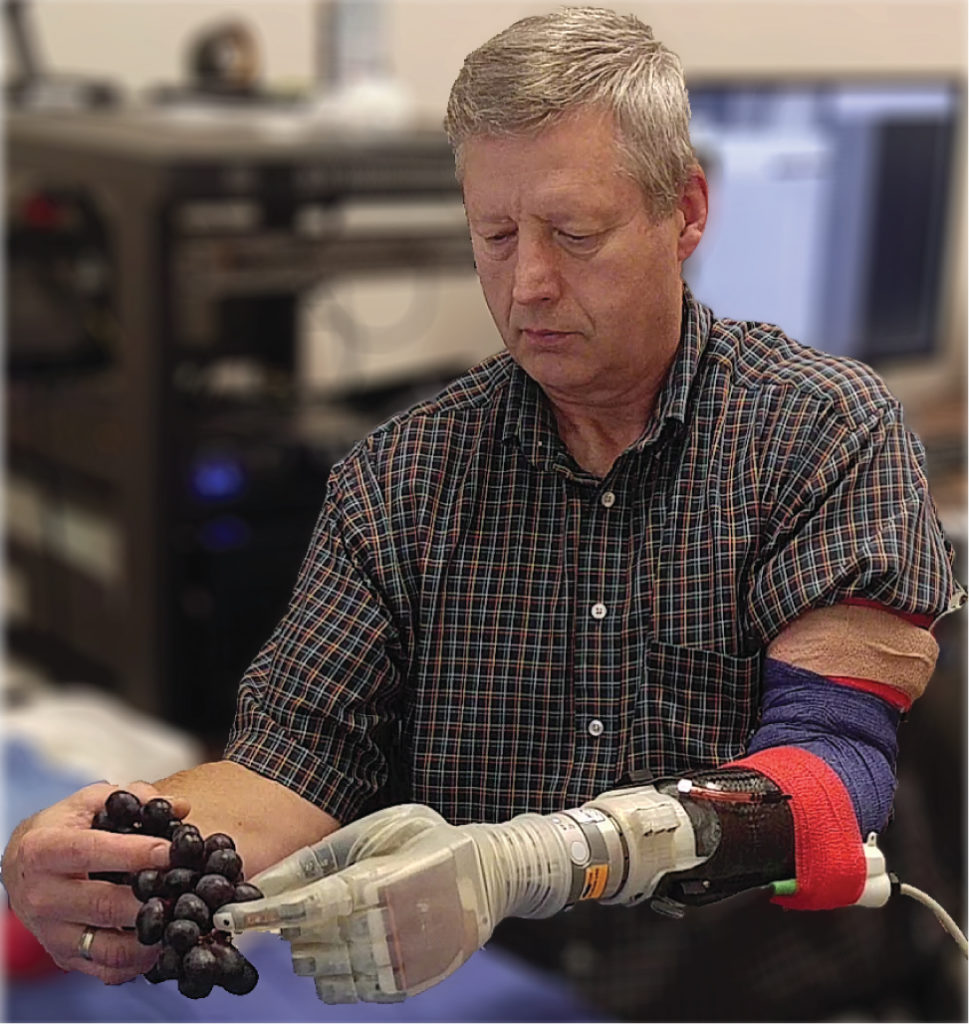
Walgamott, a real estate agent from West Valley City, Utah, and one of seven test subjects at the University of Utah, was able to pluck grapes without crushing them, pick up an egg without cracking it, and hold his wife’s hand with a sensation in the fingers similar to that of an able-bodied person.
“One of the first things he wanted to do was put on his wedding ring. That’s hard to do with one hand,” says Clark. “It was very moving.”
How those things are accomplished is through a complex series of mathematical calculations and modeling.
Kevin . Walgamott wears the LUKE prosthetic arm. Credit: University of Utah Center for Neural Interfaces
The LUKE Arm
The LUKE Arm has been in development for some 15 years. The arm itself is made of mostly metal motors and parts with a clear silicon “skin” over the hand. It is powered by an external battery and wired to a computer. It was developed by DEKA Research & Development Corp., a New Hampshire-based company founded by Segway inventor Dean Kamen.
Meanwhile, the University of Utah team has been developing a system that allows the prosthetic arm to tap into the wearer’s nerves, which are like biological wires that send signals to the arm to move. It does that thanks to an invention by University of Utah biomedical engineering Emeritus Distinguished Professor Richard A. Normann called the Utah Slanted Electrode Array.
The Array is a bundle of 100 microelectrodes and wires that are implanted into the amputee’s nerves in the forearm and connected to a computer outside the body. The array interprets the signals from the still-remaining arm nerves, and the computer translates them to digital signals that tell the arm to move.
But it also works the other way. To perform tasks such as picking up objects requires more than just the brain telling the hand to move. The prosthetic hand must also learn how to “feel” the object in order to know how much pressure to exert because you can’t figure that out just by looking at it.
First, the prosthetic arm has sensors in its hand that send signals to the nerves via the Array to mimic the feeling the hand gets upon grabbing something. But equally important is how those signals are sent. It involves understanding how your brain deals with transitions in information when it first touches something. Upon first contact of an object, a burst of impulses runs up the nerves to the brain and then tapers off. Recreating this was a big step.
“Just providing sensation is a big deal, but the way you send that information is also critically important, and if you make it more biologically realistic, the brain will understand it better and the performance of this sensation will also be better,” says Clark.
To achieve that, Clark’s team used mathematical calculations along with recorded impulses from a primate’s arm to create an approximate model of how humans receive these different signal patterns. That model was then implemented into the LUKE Arm system.
Future research
In addition to creating a prototype of the LUKE Arm with a sense of touch, the overall team is already developing a version that is completely portable and does not need to be wired to a computer outside the body. Instead, everything would be connected wirelessly, giving the wearer complete freedom.
Clark says the Utah Slanted Electrode Array is also capable of sending signals to the brain for more than just the sense of touch, such as pain and temperature, though the paper primarily addresses touch. And while their work currently has only involved amputees who lost their extremities below the elbow, where the muscles to move the hand are located, Clark says their research could also be applied to those who lost their arms above the elbow.
Clark hopes that in 2020 or 2021, three test subjects will be able to take the arm home to use, pending federal regulatory approval.
The research involves a number of institutions including the University of Utah’s Department of Neurosurgery, Department of Physical Medicine and Rehabilitation and Department of Orthopedics, the University of Chicago’s Department of Organismal Biology and Anatomy, the Cleveland Clinic’s Department of Biomedical Engineering, and Utah neurotechnology companies Ripple Neuro LLC and Blackrock Microsystems. The project is funded by the Defense Advanced Research Projects Agency and the National Science Foundation.
“This is an incredible interdisciplinary effort,” says Clark. “We could not have done this without the substantial efforts of everybody on that team.”
Editor’s note: Reposted from the University of Utah.
New Scale Robotics (NSR) has announced the first multi-tool mounting system for Universal Robots (UR) e-Series cobots. The NSR-MTM-3-URe Multi-Tool Mount (NSR-MTM) allows users to mount and control up to three grippers or other tools on one UR e-Series cobot.
The NSR-MTM System allows users to quickly set up and perform multiple processes with one robot. Benefits include:
Higher throughput in small part handling and inspection tasks.
Fewer large moves, for reduced cycle times without compromising safety.
The ability to automate more processes with fewer robots.
The NSR-MTM System includes both hardware and software. With low mass and small size, the hardware is compatible with UR’s smallest UR3e cobot. The integrated Freedrive button enables one-handed positioning to teach and set positions. The software enables fast setup and easy programming of up to three devices in one user interface on the UR teach pendant.
New Scale Robotics NSR-MTM-3-URe Multi-Tool Mount. | Credit: New Scale Robotics
NSR Devices Software is a new URCaps plugin for UR e-Series robots. Users can quickly add multiple tools to the single user interface, build tool processes with a few clicks, and run complex automation or inline inspection programs with ease. Other smart features include dynamic adjustment of tool center of gravity depending on mass of object picked.
The MTM hardware mounts to the UR robot tool flange with four screws and one connector to the internal tool port. Up to three tools are mounted on the MTM faces using the standard ISO 9409-1-50-4-M6 interfaces and M8 round connector. The MTM mount uses power and RS485 signals from the robot’s internal cables and slip rings. No external cables are required.
Applications include small part picking, movement, measurement, data logging, sorting and assembly. Used with the small and precise grippers from New Scale Robotics, the NSR-MTM System allows increased productivity from multiple tools while still fitting in the tightest spaces.
NSR Devices Software is a new URCaps plugin for UR e-Series robots. | Credit: New Scale Robotics
Robotics developers have taken a variety of approaches to try to equal human dexterity. Cambridge Consultants today unveiled Hank, a robot with flexible robotic fingers inspired by the human hand. Hank uses a pioneering sensory system embedded in its pneumatic fingers, providing a sophisticated sense of touch and slip. It is intended to emulate the human ability to hold and grip delicate objects using just the right amount of pressure.
Cambridge Consultants stated that Hank could have valuable applications in agriculture and warehouse automation, where the ability to pick small, irregular, and delicate items has been a “grand challenge” for those industries.
Picking under pressure
While warehouse automation has taken great strides in the past decade, today’s robots cannot emulate human dexterity at the point of picking diverse individual items from larger containers, said Cambridge Consultants. E‑commerce giants are under pressure to deliver more quickly and at a cheaper price, but still require human operators for tasks that can be both difficult and tedious.
“The logistics industry relies heavily on human labor to perform warehouse picking and packing and has to deal with issues of staff retention and shortages,” said Bruce Ackman, logistics commercial lead at Cambridge Consultants. “Automation of this part of the logistics chain lags behind the large-scale automation seen elsewhere.”
By giving a robot additional human-like senses, it can feel and orient its grip around an object, applying just enough force, while being able to adjust or abandon if the object slips. Other robots with articulated arms used in warehouse automation tend to require complex grasping algorithms, costly sensing devices, and vision sensors to accurately position the end effector (fingers) and grasp an object.
Hank uses soft robotic fingers controlled by airflows that can flex the finger and apply force. The fingers are controlled individually in response to the touch sensors. This means that the end effector does not require millimeter-accurate positioning to grasp an object. Like human fingers, they close until they “feel” the object, said Cambridge Consultants.
With the ability to locate an object, adjust overall system position and then to grasp that object, Hank can apply increased force if a slip is detected and generate instant awareness of a mishandled pick if the object is dropped.
Cambridge Consultants claimed that Hank moves a step beyond legacy approaches to this challenge, which tend to rely on pinchers and suction appendages to grasp items, limiting the number and type of objects they can pick and pack.
“Hank’s world-leading sensory system is a game changer for the logistics industry, making actions such as robotic bin picking and end-to-end automated order fulfillment possible,” said Ackman. “Adding a sense of touch and slip, generated by a single, low-cost sensor, means that Hank’s fingers could bring new efficiencies to giant distribution centers.”
Molded from silicone, Hank’s fingers are hollow and its novel sensors are embedded during molding, with an air chamber running up the center. The finger surface is flexible, food-safe, and cleanable. As a low-cost consumable, the fingers can simply be replaced if they become damaged or worn.
With offices in Cambridge in the U.K.; Boston, Mass.; and Singapore, Cambridge Consultants develops breakthrough products, creates and licenses intellectual property, and provides business and technology consulting services for clients worldwide. It is part of Altran, a global leader in engineering and research and development services. For more than 35 years, Altran has provided design expertise in the automotive, aerospace, defense, industrial, and electronics sectors, among others.
OnRobot has launched a Digital I/O converter that enables its RG2, RG6, Gecko, and VG10 grippers to seamlessly integrate with a wider range of collaborative robot arms. The Digital I/O Converter enables the cobot arms to work with the OnRobot grippers with minimal need for programming, resulting in faster switch times between multiple tasks.
OnRobot said this leads to an increase in production as the cobots can get back to work faster. OnRobot said the Digital I/O Converter works with the following brands and cobot arms:
Of course, OnRobot also supports Universal Robots, the leading collaborative robotics company in the world. OnRobot’s RG2, RG6 and VG10 are part of the UR+ program. OnRobot’s HEX Force/Torque sensing package is also part of the UR+ program.
As different cobot arms understand I/O signals differently, OnRobot said the I/O Converter is able to convert NPN to PNP signals and vice versa. What does that mean for the robot operator? PNP sensors, sometimes known as “sourcing sensors” because they source positive power to the output, and NPN sensors, oftentimes called “sinking sensors” because they sink the ground to the output, are the technical terms for the type of transistor used to switch the output.
With the I/O converter, programmers don’t have to worry about the robots not understanding the signals received. The Digital I/O Converter also includes an adapter plate for converting the UR-type A flanges mechanically to other robot flanges.
The Digital I/O converter can be ordered at local sales offices. Additional information, datasheets, and manuals detailing mounting, cable routing, software configurations, and electrical connection can be downloaded here.
Established in 2015, OnRobot merged with Perception Robotics and OptoForce in 2018, followed by the acquisition of Purple Robotics. Purple Robotics was launched in 2017 by three former Universal Robots (UR) employees with 18-plus years experience working on the UR3, UR5, and UR10 cobots. Co-founders Lasse Kieffer, Henrik Tillitz Hansen, and Peter Nadolny Madsen, who describe themselves as “three Danish super-nerds,” found 40 partners in 25 countries just three months after launching the PR10.
OnRobot kicked off 2019 by shipping pre-orders of its Gecko Gripper that uses millions of micro-scaled fibrillar stalks that adhere to a surface using powerful van der Waals forces — the same way that geckos climb.
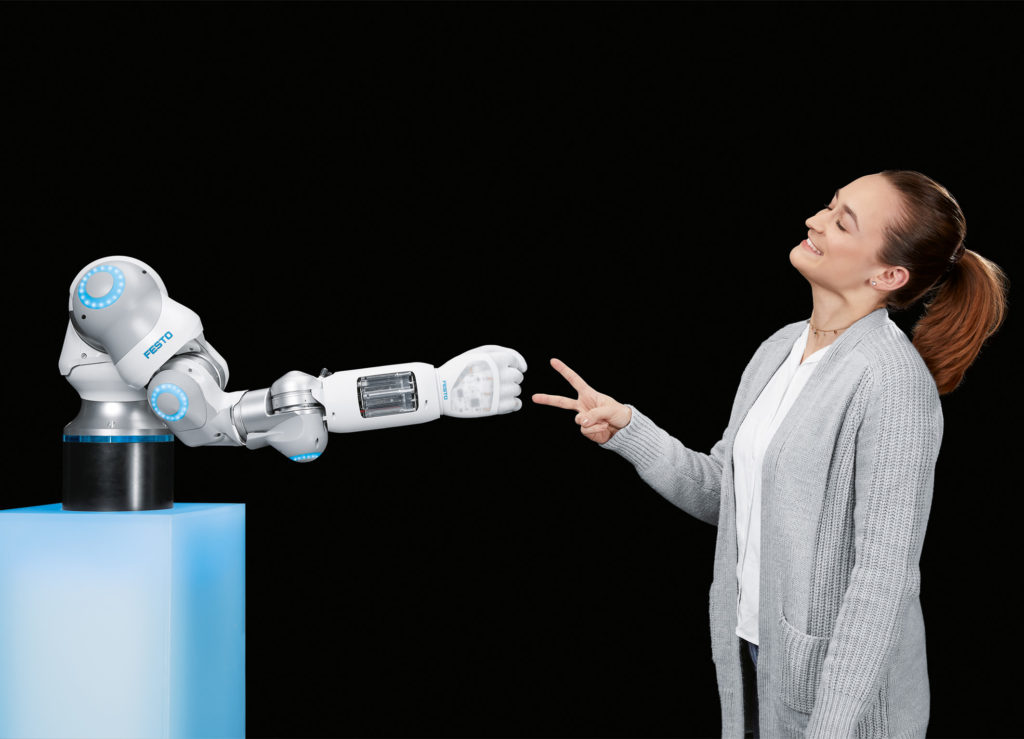
Bionic SoftHand from Festo plays Rock-Paper-Scissors. Credit: Philipp Freudigmann
Whether it’s grabbing, holding or turning, touching, typing or pressing — in everyday life, we use our hands as a matter of course for the most diverse tasks. In that regard, the human hand, with its unique combination of power, dexterity, and fine motor skills, is a true miracle tool of nature. What could be more natural than equipping robots in collaborative workspaces with a gripper that is modeled after this example from nature and solves various tasks by learning with artificial intelligence? Festo’s Bionic series does just that.
Festo announced that it will show its BionicSoftHand pneumatic robot hand at Hannover Messe 2019. Combined with the BionicSoftArm, a pneumatic lightweight robot, these future concepts are suitable for human-robot collaboration.
The BionicSoftHand is pneumatically operated so that it can interact safely and directly with people. Unlike the human hand, the BionicSoftHand has no bones. Its fingers consist of flexible bellows structures with air chambers.
The bellows are enclosed in the fingers by a special 3D textile coat knitted from both, elastic, and high-strength threads. Thanks to this soft robotics material, it is possible to determine exactly where the structure expands and generates power and where it is prevented from expanding. This makes it light, flexible, adaptable, and sensitive, yet capable of exerting strong forces.
AI-guided Bionic grasping
The methods for machines to learn are comparable with those of humans. They require positive or negative feedback to their actions in order to classify and learn from them. BionicSoftHand uses this method of reinforcement learning.
This means instead of imitating a specific action, the hand is merely given a goal. It uses trial and error to achieve its goal. Based on received feedback, the Bionic gripper gradually optimizes its actions until the task is finally solved.
Specifically, the BionicSoftHand can rotate a 12-sided cube so that a previously defined side ends up on top. The necessary movement strategy is taught in a virtual environment with the aid of a digital twin, which is created with the help of data from a depth-sensing camera and computer vision algorithms.
Proportional piezo valves for precise control
To minimize the effects of tubing, Festo’s developers have specially designed a small, digitally controlled valve terminal, which is mounted directly on the BionicSoftHand. This means that the tubes for controlling the gripper fingers do not have to be pulled through the entire robot arm.
Thus, the BionicSoftHand can be quickly and easily connected and operated with only one tube each for supply air and exhaust air. With the proportional piezo valves used, the movements of the fingers can be precisely controlled.
The days of strict separation between factory workers and automation are passing, thanks to collaborative robots. As their workspaces converge, humans and machines will be able to work simultaneously on the same workpiece or component — without having to be shielded from each other for safety reasons.
The BionicSoftArm is a compact further development of Festo’s BionicMotionRobot, whose range of applications has been significantly expanded. Thanks to its modular design, the Bionic arm can be combined with up to seven pneumatic bellows segments and rotary drives. This guarantees maximum flexibility in terms of reach and mobility. The arm can work around obstacles even in the tightest of spaces if necessary.
At the same time, it is completely flexible and can work safely with people. Direct human-robot collaboration is possible with the BionicSoftArm, as well as its use in classic SCARA applications, such as pick-and-place tasks.
Flexible application possibilities
The modular robot arm can be used for a wide variety of applications, depending on the design and mounted gripper. Thanks to its flexible kinematics, the BionicSoftArm can interact directly and safely with humans.
At the same time, the kinematics make it easier for the Bionic arm to adapt to different tasks at various locations in production environments. The elimination of costly safety devices such as cages and light barriers shortens conversion times and thus enables flexible use – completely in accordance with adaptive and economical production.
BionicFinWave: Underwater robot with unique fin drive
Nature teaches us impressively, how optimal drive systems for certain swimming movements should look. To move forward, the marine planarian and sepia create a continuous wave with their fins, which advances along their entire length.
For the BionicFinWave, the bionics team was inspired by this undulating fin movement. The undulation pushes the water backwards, creating a forward thrust. This principle allows the BionicFinWave to maneuver forwards or backwards through an acrylic tube system.
The BionicFinWave’s two side fins are completely cast out of silicone and do not require struts or other supporting elements. The two fins are attached to the left and right of nine small lever arms, which in turn are powered by two servo motors. Two adjacent crankshafts transmit the force to the levers so that the two fins can be moved individually to generate different shaft patterns. They are particularly suitable for slow and precise locomotion and whirl up less water than, for example, a screw drive.
A cardan joint is located between each lever segment to ensure that the Bionic robot’s crankshafts are flexible. For this purpose, the crankshafts including the joints and the connecting rod are made of plastic in one piece using the 3D printing process.
Intelligent interaction of a wide variety of components
The remaining elements in the BionicFinWave’s body are also 3D-printed, which enables its complex geometries in the first place. With their cavities, they act as flotation units.
At the same time, the entire control and regulation technology are watertight, safely installed and synchronized in a very tight space. The Festo Bionic Learning Network has continued its innovative approach to robotics.
OnRobot, a global leader in end-of-arm tooling for collaborative robots, announced today it will be co-exhibiting next month with Futura Automation at the ATX West show, in Anaheim, Calif., February 5 to 7. OnRobot kicked off the new year by shipping pre-orders of its newly-available Gecko Gripper, that uses millions of micro-scaled fibrillar stalks that adhere to a surface using powerful van der Waals forces — the same way that geckos climb.
Unique new gripper offers cost-efficient alternative to vacuum solutions, replacing compressed air with tactile technology that adhere to surfaces the same way geckos climb. OnRobot will also exhibit the new RG2-FT gripper, the first intelligent gripper to see and feel objects using built-in force/torque sensing.
On display for the first time at the ATX Show, the Gecko Gripper lets robots pick up flat, smooth objects with significant energy savings over existing grippers such as vacuum grippers, which need compressed air that is costly, power-intensive, and bulky. The Gecko Gripper interfaces with any type of robot and can pay for itself in eight months in cost savings for electricity to compress air alone. Now being sold to manufacturing companies worldwide, the Gecko Grippers can affix to a wide range of surfaces including fragile items that vacuum grippers can’t handle. The Gecko Gripper also offers competitive advantages over electrostatic grippers, which are weaker and need high-voltage systems to operate.
Based on the nimble gecko lizards native to the Southern Hemisphere, in its initial design the Gecko Gripper progressed from a Stanford research project to the NASA Jet Propulsion Lab to industry through multiple collaborations. The original NASA use-case was for salvaging and repairing satellites such as solar panels, given the Gecko Gripper’s unique ability to operate in a vacuum. Perception Robotics created the first industrial grippers with new polymer research that increased gripping strength by 5X. Perception was then acquired by OnRobot, which is dedicated to developing and commercializing innovation that helps manufacturers take full advantage of collaborative robotics.
“The market reaction to the Gecko Gripper has been extremely positive,” says Kristian Hulgard, OnRobot’s General Manager for Americas. “We see the gripper now challenging traditional application and material handling design in a wide range of delicate tasks such as picking up porous and fragile objects like PCB boards,” says Hulgard, explaining that the Gecko Gripper excels at picking up objects with holes that vacuum grippers can’t address as they lose suction when air passes through openings in the object.
In addition to the Gecko Gripper, OnRobot will have its RG2-FT on display at ATX, a new gripper now generally available to manufacturers around the world. An update to OnRobot’s first edition, the RG2-FT now has built-in force/torque sensing, supporting work in piece detection and centering. With inbuilt 6 axis F/T and proximity laser sensors at the fingertips, the RG2-FT is the first intelligent gripper on the market that can see and feel objects, thus ensuring faster deployment of collaborative applications and ultimately higher productivity.
“The RG2-FT gripper is a sophisticated—yet entirely accessible—new piece of technology that manufacturers with tasks such as assembly, insertion, and quality inspection are now requesting,” says Hulgard. “The intelligent force feedback provided by the gripper’s sensors will also help operators in adjusting their applications for optimal design and positioning.” OnRobot products come in North America through a rapidly expanding partner network.
Established in 2015, the company merged with Perception Robotics and OptoForce in 2018, followed by a recent acquisition of Purple Robotics. Now, the OnRobot product range features a wide assortment of robot equipment, including: electric grippers, force/torque sensors, gecko grippers, and tool changers. This new combination of offerings from OnRobot makes it quicker and simpler to automate tasks such as packaging, quality control, materials handling, machine operation, assembly, and welding. The company plans to grow through more acquisitions in the coming years. Headquartered in Odense, Denmark, OnRobot’s North American office is located in Dallas, TX. The company also has offices in Germany, China, Malaysia, and Hungary. For more information, visit www.onrobot.com.


 Keynotes
Keynotes