KIST’s research shows that robots can be intuitively taught to be flexible by humans rather than through numerical calculation or programming the robot’s movements. Credit: KIST
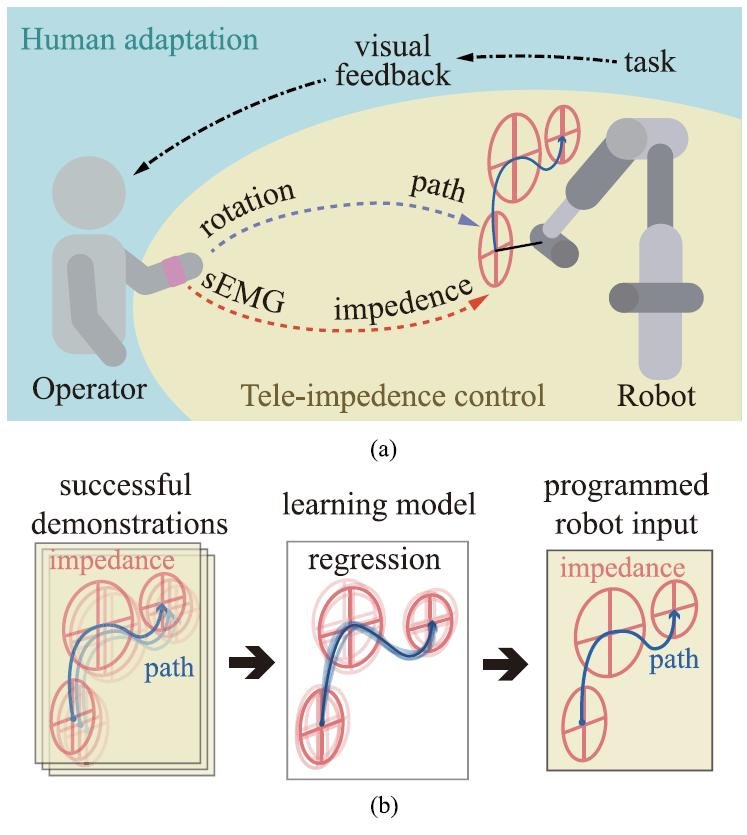
The Center for Intelligent & Interactive Robotics at the Korea Institute of Science and Technology, or KIST, said that a team led by Dr. Kee-hoon Kim has developed a way of teaching “impedance-controlled robots” through human demonstrations. It uses surface electromyograms of muscles and succeeded in teaching a robot to trap a dropped ball like a soccer player.
A surface electromyogram (sEMG) is an electric signal produced during muscle activation that can be picked up on the surface of the skin, said KIST, which is led by Pres. Byung-gwon Lee.
Recently developed impedance-controlled robots have opened up a new era of robotics based on the natural elasticity of human muscles and joints, which conventional rigid robots lack. Robots with flexible joints are expected to be able to run, jump hurdles and play sports like humans. However, the technology required to teach such robots to move in this manner has been unavailable until recently.
KIST uses human muscle signals to teach robots how to move
The KIST research team claimed to be the first in the world to develop a way of teaching new movements to impedance-controlled robots using human muscle signals. With this technology, which detects not only human movements but also muscle contractions through sEMG, it’s possible for robots to imitate movements based on human demonstrations.
Dr. Kee-hoon Kim’s team said it succeeded in using sEMG to teach a robot to quickly and adroitly trap a rapidly falling ball before it comes into contact with a solid surface or bounces too far to reach — similar to the skills employed by soccer players.
SEMG sensors were attached to a man’s arm, allowing him to simultaneously control the location and flexibility of the robot’s rapid upward and downward movements. The man then “taught” the robot how to trap a rapidly falling ball by giving a personal demonstration. After learning the movement, the robot was able to skillfully trap a dropped ball without any external assistance.
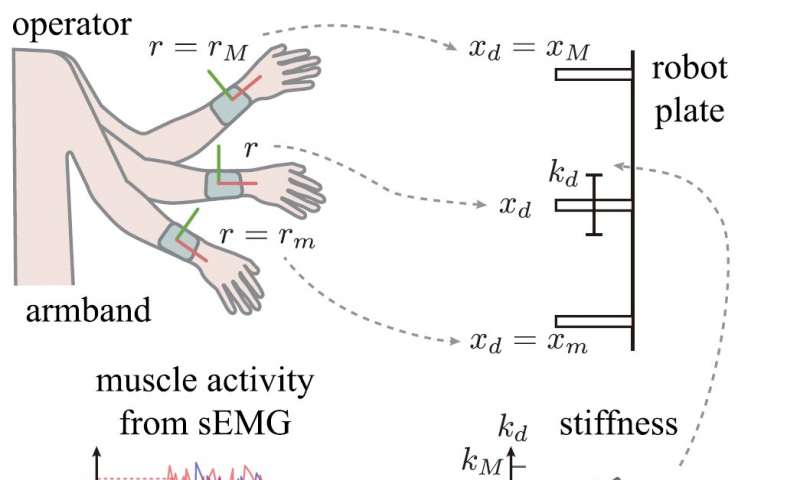
sEMG sensors attached to a man’s arm, allowed him to control the location and flexibility of a robot’s rapid movements. Source: KIST
This research outcome, which shows that robots can be intuitively taught to be flexible by humans, has attracted much attention, as it was not accomplished through numerical calculation or programming of the robot’s movements. This study is expected to help advance the study of interactions between humans and robots, bringing us one step closer to a world in which robots are an integral part of our daily lives.
Kim said, “The outcome of this research, which focuses on teaching human skills to robots, is an important achievement in the study of interactions between humans and robots.”